Submodules
parameter
Submodule containing the class Parameter and the utility
function trim_single_param().
- class Parameter(bounds: Optional[Tuple[float, float]] = None, values: Optional[Tuple[float, ...]] = None, randomize: bool = True, *, name: str)
Bases:
objectThis class provides the abstract description of a parameter that needs to be estimated in a quantum metrological task. The user can define one or more
Parameterobjects that represent the targets of the estimation.Achtung! The
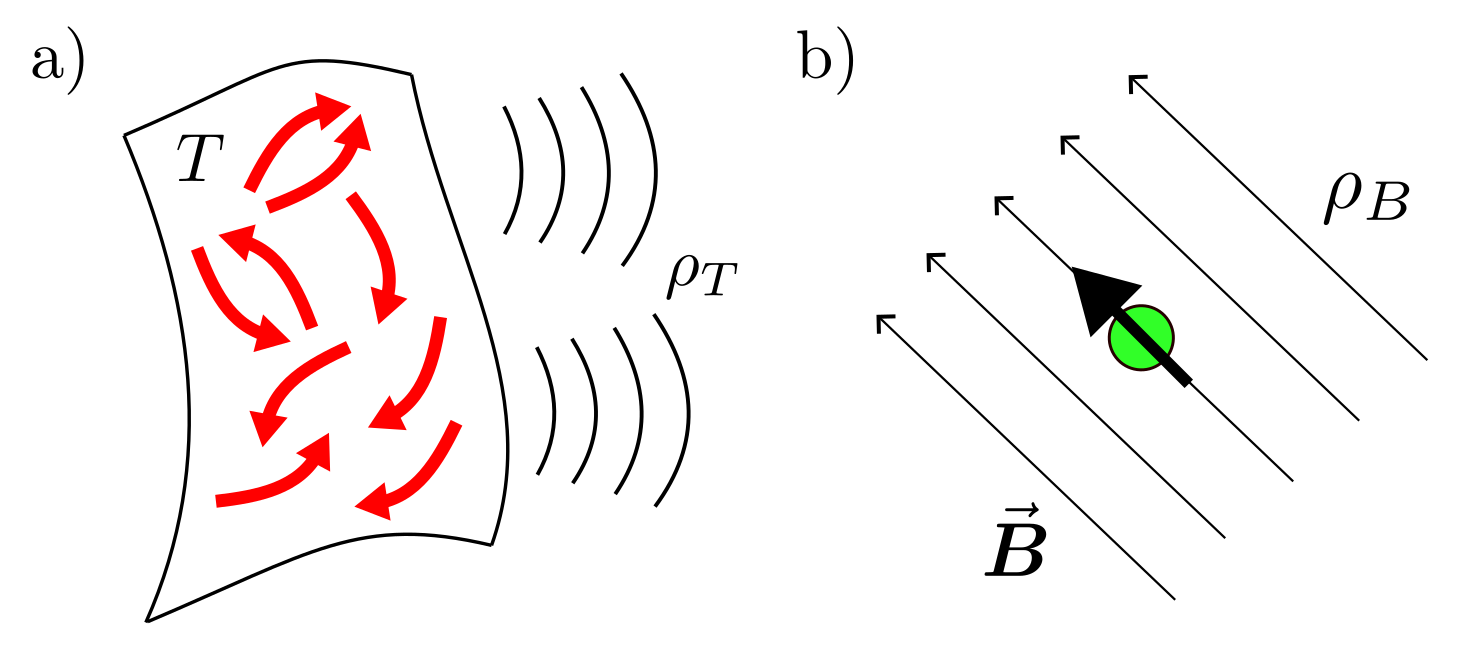
Parameterobjects should only be defined within the initialization of aPhysicalModelobject.In an experiment, the values of the parameters are encoded in the state of the quantum system used as a probe. Depending on whether we can directly access the encoding quantum channel or not, we classify the task as a quantum estimation problem, if we are only given the codified probe state, or as a quantum metrology problem, if we can access the channel.
An example of parameter estimation would be receiving the radiation generated by a distribution of currents on a plane, which depends on the properties of the source, like the temperature for example 1. In this scenario, the quantum probe is the radiation. Since the emission of the radiation happens by hypothesis in a far and unaccessible region, we don’t have direct access to the quantum channel that performs the encoding, but only to the encoded states
 ,
which is the state of the radiated field at detection.
,
which is the state of the radiated field at detection.An example of a quantum metrological task is the estimation of the environmental magnetic field with a spin, for which we can choose the initial state and the duration of the interaction. The final state of the spin is
 .
.
A parameter can be continuous or discrete. Naturally continuous parameters are the magnetic field and the temperature, for example. A discrete parameter is the sign of a signal or the structure of an interaction 2. When discrete parameters are present, we are in the domain of hypothesis testing. In a metrological task, we may have a mix of continuous and discrete parameters, like in the
dolinarreceiver.A parameter can be a nuisance; which is an unknown parameter that needs to be estimated, on which we however do not evaluate the precision of the procedure because we are not directly interested in the estimation of this parameter. An example of this is the fluctuating optical visibility of an interferometer when we are only interested in the phase. Estimating the nuisance parameters is often necessary/useful to estimate the parameters of interest. Whether a parameter is a nuisance or not is not specified in the class
Parameter, but in the user-defined methodloss_function()of the classesStatefulSimulation.- 1
E. Köse and D. Braun Phys. Rev. A 107, 032607 (2023).
- 2
A. A. Gentile, B. Flynn, S. Knauer, et al. Nat. Phys. 17, 837–843 (2021).
Attributes
- bounds: Tuple[float, float]
Tuple of extrema of the set of admissible values for the parameter. It is defined both for continuous and discrete parameters. In this latter case it is bounds[0]=min(values) and bounds[1]=max(values).
- values: Tuple[float, …]
Tuple of admissible values for a parameter. This tuple contains the values passed to the class constructor in the parameter values, sorted from the smallest to the largest and without repetitions.
Achtung! This attribute is defined only for a discrete parameter.
- continuous: bool
Determines if the parameter is continuous or not. It controls the behavior of the
reset()method.- randomize: bool
Determines if the initialization of the parameter values is stochastic or deterministic. It controls the behavior of the
reset()method.- name: str
Name of the parameter.
- bs: int
Size of the first dimension of the Tensor produced by the
reset()method and number of estimations performed simultaneously in the simulation.- prec: str
Floating point precision of the parameter values, can be float32 or float64.
Notes
Beside the variables passed to the constructor, a
Parameterobject requires the manual change of two other attributes to work properly. One attribute is the precision prec, which can be set to either float32 or float64 (with the default value being float64). The other attribute is the batchsize bs, which has a default value of 0. These changes are made automatically if theParameterobject is defined within the call to the constructor of thePhysicalModelclass.Parameters passed to the class constructor.
Parameters
- bounds: Tuple[float, float], optional
Tuple of floats containing the extrema of the interval of admissible values for a continuous parameter, where bounds[0] is the minimum and bounds[1] the maximum.

If the bounds parameter is passed to the object constructor, then the
Parameterobject is automatically treated as continuous and the attribute continuous is therefore set to True.Achtung! The bounds and values parameters are mutually exclusive and cannot both be both passed to the
Parameterclass constructor.- values: Tuple[float, …], optional
Tuple of float of unknown length containing the admissible values for a discrete parameter. Repetitions are ignored.

If the values parameter is passed to the constructor of the object, this is automatically treated as a discrete parameter and the attribute continuous is set to False.
Achtung! The bounds and values parameters are mutually exclusive and cannot both be both passed to the
Parameterclass constructor.Achtung! Even if only the values parameter is passed in the call to the class constructor, the bounds tuple is still included in the attributes. In this case it is defined as bounds[0]=min(values) and bound[1]=max(values).
- randomize: bool = True
This flag controls whether the function
reset()should generate random values or behave (almost) deterministically.Note: The value of this flag should be changed only for a discrete parameter.
Th use of this flag is explained through the following example. Consider a parameter that can assume three values {a, b, c}. If the randomization is on and we call the
reset()method with parameter num_particles, we get a Tensor of shape (bs, num_particles, 1) where the entries of each row have been extracted uniformly and stochastically from the set {a, b, c}. For example, if num_particles=12, a row could look like (a, b, a, c, b, b, a, c, a, c, a, b). If we however set randomize=False, then the rows are all equal to (a, a, a, a, b, b, b, b, c, c, c, c). With the randomization turned off, if k>1 is the number of admissible values for the parameter, we have lfloor num_particles/k rfloor repetitions of each element of the tuple values in each row of the output Tensor. If num_particles is not divisible by k, the values of the last, at most k-1, remaining particles are extracted uniformly and stochastically from the tuple values.If we generate a single particle, its value will always be extracted randomly and uniformly from values, since one will be always the remainder of the division 1/k.
The utility of setting randomize=False is confined to the task of hypothesis testing, where we want a number of particles in the particle filter that matches the number of hypotheses. In this case, in the initialization of the
ParticleFilterobject, we will set num_particles=k, with k being the number of hypotheses, so that with randomize=False, the particle filter ensemble contains exactly one and only one particle for each hypothesis. Thereset()method, called with parameter num_particles=1 for generating the true values in the simulation, returns, however, a single uniformly randomly extracted hypothesis among the admissible ones defined in values.Note: Setting this flag to False for a continuous parameter has undesired effects. In this scenario the true values of the parameter in the simulation are generated by calling
reset()with num_particles=1, which, for a continuous parameter, is implemented as a linspace(bounds[0], bounds[1], 1), that always returns bounds[0].- name: str
Name of the parameter.
- reset(seed: Tensor, num_particles: int, fragmentation: int = 1) Tensor
Generates a Tensor of admissible values for the parameter.
Produces a Tensor of shape (bs, num_particles, 1) of type prec, with a series of independent valid values for the parameter. Valid means that they lie in the interval specified by the tuple bounds if the parameter is continuous or, if it is discrete, that they belong to the tuple values, both being attributes of the
Parameterclass. The random entries are generated to cover uniformly the set of admissible values, whether it is discrete or continuous. According to the parameter randomize of the class constructor, this function implements a stochastic or deterministic generation of the Tensor entries.Parameters
- seed: Tensor
Seed of the random number generator that initializes the values of the parameter. It is a Tensor of type int32 and of shape (2,).
This is the kind of seed that is accepted by the stateless random functions of the module
tensorflow.random.- num_particles: int
Size of the second dimension of the Tensor generated by this method. It is the number of values generated for each batch.
- fragmentation: int = 1
Number of pattern repetition in populating the particles with the parameter values. This parameter is only important for a discrete parameter with randomize=False.
Returns
Notes
This method is used in
ParticleFilterto initialize the particle filter ensemble and inPhysicalModeland children classes to produce the true values of the parameter in the estimation task, according to which the outcomes of the measurements are simulated.Achtung!: This method should be called with randomize=True for a continuous parameter. If randomize=False, the true values of the parameter in the simulation of the estimation are generated by calling this method with num_particles=1, which, for a continuous parameter is implemented as a linspace(bounds[0], bounds[1], 1), which always returns bounds[0].
- trim_single_param(old_param: Tensor, param: Parameter, one_arr: Tensor) Tensor
Trims the values of a given Tensor to be within the bounds set for the corresponding
Parameterobject. If the parameter is discrete the values of the particles are levelled to the closest element among the admissible values.Parameters
- old_param: Tensor
Tensor of values for the parameter param that do not necessarily lay in the acceptable region of parameter values, defined by param.bounds. The shape and the type of this Tensor must be the same of one_arr.
- param: Parameter
Describes abstractly the parameter.
- one_arr: Tensor
Tensor filled with ones, of the same type and shape as old_param.
Returns
- Tensor
A modified version of old_param, where all the entries that were greater than param.bounds[1] have been set to param.bounds[1] and all those that were smaller than param.bounds[0] have been set to param.bounds[0]. If the parameter is discrete and some entries of old_param don’t exactly belong to the set of admissible values, i.e. param.values, the said entries are “levelled” to the closest element of param.values. This is useful for correcting the distortions of the discrete parameter values introduced by the perturbation in the resampling procedure.
Notes
Since discrete parameters also have a bounds attribute, this function works on them as well. It is used in the resampling routine of the
ParticleFilterclass, where the particles are perturbed or newly generated and could fall out of the admissible values set.
physical_model
Submodule containing the PhysicalModel class
alongside with StateSpecifics and Control.
- class Control(name: str, is_discrete: bool = False)
Bases:
objectControl parameter for the physical sensor.
A control is a tunable parameter that can be adjusted during the experiment. This could be for example the measurement duration, the detuning of the laser frequency driving a cavity, a tunable phase in an interferometer, or other similar parameters.
In a pictorial sense, control parameters are all the buttons and knobs on the electronics of the experiment.
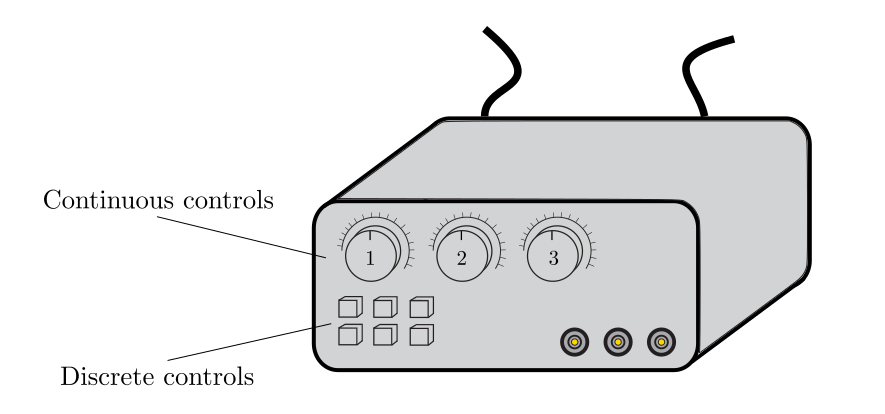
A control can be continuous if it takes values in an interval, or discrete if it takes only a finite set of values (like on and off).
- is_discrete: bool = False
If the parameter is discrete this flag is true.
If in the simulation at least one of the controls is discrete, then the control_strategy attribute of the
Simulationclass should be a callable with headercontrols, log_prob_control = control_strategy(input_strategy, rangen)that is, it can contain stochastic operations (like the extraction of the discrete control from a probability distribution) and it must return the logarithm of the extraction probability of the chosen controls.
- name: str
Name of the control.
- class PhysicalModel(batchsize: int, controls: List[Control], params: List[Parameter], state_specifics: StateSpecifics, *, recompute_state: bool = True, outcomes_size: int = 1, prec: str = 'float64')
Bases:
objectAbstract representation of the physical system used as quantum probe.
This class and its children,
StatefulPhysicalModelandStatelessPhysicalModel, contain a description of the physics of the quantum probe, of the unknown parameters to estimate, of the dynamics of their encoding on the probe, and of the measurements.Achtung! In implementing a class for some particular device, the user should not directly derive
PhysicalModel, but instead the classesStatefulPhysicalModelandStatelessPhysicalModelshould be the base objects.When programming the physical model, the first and most important decision to make is whether the model is stateful or stateless. In the former case,
StatefulPhysicalModelshould be used, while in the latter caseStatelessPhysicalModelshould be chosen. The probe is stateless if it is reinitialized after each measurement and no classical information needs to be passed from one measurement to the next, other than that contained in the particle filter ensemble. If this is not the case, then the probe is stateful.Achtung! If some classical information on the measurement outcomes needs to be passed down from measurement to measurement, other than the information contained in the particle filter ensemble, then the probe is stateful. For example, if we perform multiple weak measurements on a signal and want to keep track of the total number of photons observed, then this information is part of the signal state. See the
dolinarmodule for an example.Attributes
- bs: int
The batch size of the physical model, i.e., the number of probes on which the estimation is performed simultaneously in the simulation.
- controls: List[
Control] A list of controls on the probe, i.e., the buttons and knobs of the experiment.
- params: List[
Parameter] A list of unknown parameters to be estimated, along with the corresponding sets of admissible values.
- controls_size: int
The number of controls on the probe, i.e., the length of the controls attribute.
- d: int
The number of unknown parameters to estimate, i.e., the length of the params attribute.
- state_specifics:
StateSpecifics The size of the last dimension and type of the Tensor used to represent the state of the probe internally in the simulation.
- recompute_state: bool
A flag passed to the constructor of the
PhysicalModelclass; it controls whether the state ensemble should be recomputed after a resampling of the particles or not.- outcomes_size: int
A parameter passed to the constructor of the
PhysicalModelclass; it is the number of scalar outcomes of a measurement on the probe.- prec: str
The floating point precision of the controls, outcomes, and parameters.
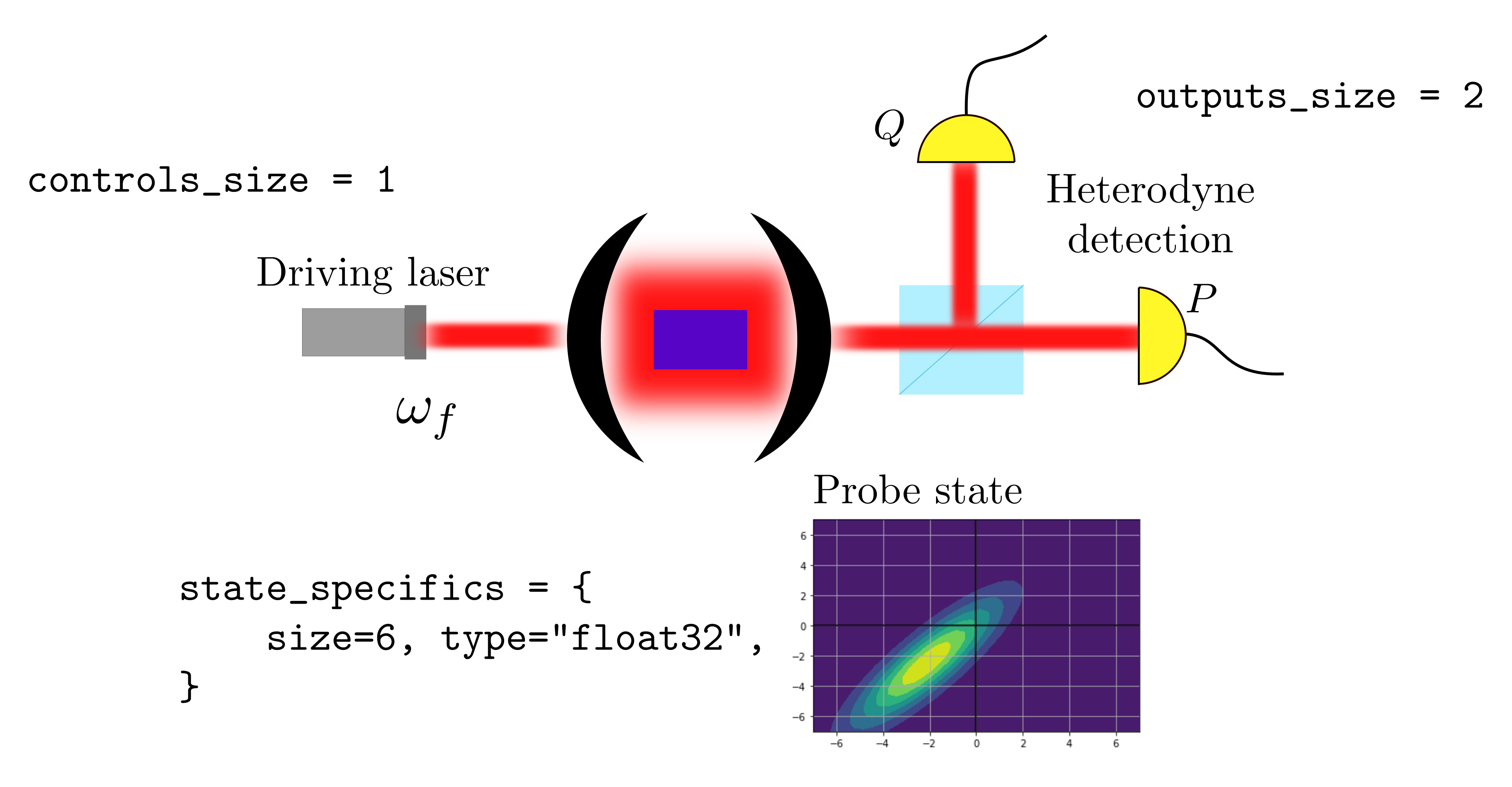
Examples
For a metrological task performed on a cavity that is driven by a laser, and where we can control the laser frequency, we have control_size=1. If a heterodyne measurement is performed on the cavity, then outcomes_size=2, because a measurement produces an estimate for both the quadratures. Assuming the cavity state is Gaussian, it can be represented by 6 real numbers (two for the mean and four for the covariance). The number of scalar quantities can be reduced to 5 by observing that the covariance matrix is symmetric.
Parameters passed to the constructor of the
PhysicalModelclass.Parameters
- batchsize: int
Batch size of the physical model, i.e., the number of simultaneous estimations in the simulation.
- controls: List[
Control] A list of controls for the probe (the buttons and knobs of the experiment).
- params: List[
Parameter] A list of
Parameterobjects that represent the unknowns of the estimation.- state_specifics:
StateSpecifics The size of the last dimension and type of the Tensor used to represent internally in the simulation the state of the probe.
- recompute_state: bool = True
Controls whether the state ensemble should be recomputed with the method
recompute_state()after a resampling of the particles or not.Achtung! This flag should be deactivated only if the states in the ensemble don’t depend on the particles or if the resampling has been deactivated.
Recomputing the state is very expensive, especially when there have already been many measurement steps. One should consider whether to resample the particles at all in a simulation involving a relatively large quantum state.
- outcomes_size: int = 1
Number of scalars collected in a measurement on the probe.
- prec: str = “float64”
Floating point precision of the controls, outcomes, and parameters.
- true_values(rangen: Generator) Tuple[Tensor]
Provides a batch of fresh “true values” for the parameters of the system, from which the measurement is simulated.
Parameters
- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- Tensor
Tensor of shape (bs, 1, d), where bs and d are attributes of the
PhysicalModelclass. For each estimation in the batch, this method produces a single instance of each parameters in the attribute params, extracted uniformly from the allowed values. For doing so the methodreset()is called with num_particles=1, for ech parameter.
- wrapper_count_resources(resources: Tensor, outcomes: Tensor, controls: Tensor, true_values: Tensor, state: Tensor, meas_step: Tensor) Tuple[Tensor]
wrapper_model
- class StateSpecifics
Bases:
TypedDictSize and type StateSpeof the probe state collected in a single object.
Examples
For a single-qubit probe, the state can be represented by a 2x2 complex matrix with four entries, or by a 3-dimensional vector of real values using the Bloch representation. For a cavity with a single bosonic mode, which is always in a Gaussian state, we need a 2x2 real covariance matrix and a 2-dimensional real vector to represent the state. This requires a total of 6 real values, which can be reduced to 5 noticing that the covariance matrix is symmetric.
- size: int
Size of a 1D Tensor necessary to describe unambiguously the state of the probe.
- type: str
Type of the Tensor representing the probe state. Can be whatever type admissible in Tensorflow.
stateful_physical_model
Module containing the stateful version
of PhysicalModel.
- class StatefulPhysicalModel(batchsize: int, controls: List[Control], params: List[Parameter], state_specifics: StateSpecifics, *, recompute_state: bool = True, outcomes_size: int = 1, prec: str = 'float64')
Bases:
PhysicalModelAbstract description of a stateful quantum probe.
Parameters passed to the constructor of the
PhysicalModelclass.Parameters
- batchsize: int
Batch size of the physical model, i.e., the number of simultaneous estimations in the simulation.
- controls: List[
Control] A list of controls for the probe (the buttons and knobs of the experiment).
- params: List[
Parameter] A list of
Parameterobjects that represent the unknowns of the estimation.- state_specifics:
StateSpecifics The size of the last dimension and type of the Tensor used to represent internally in the simulation the state of the probe.
- recompute_state: bool = True
Controls whether the state ensemble should be recomputed with the method
recompute_state()after a resampling of the particles or not.Achtung! This flag should be deactivated only if the states in the ensemble don’t depend on the particles or if the resampling has been deactivated.
Recomputing the state is very expensive, especially when there have already been many measurement steps. One should consider whether to resample the particles at all in a simulation involving a relatively large quantum state.
- outcomes_size: int = 1
Number of scalars collected in a measurement on the probe.
- prec: str = “float64”
Floating point precision of the controls, outcomes, and parameters.
- count_resources(resources: Tensor, outcomes: Tensor, controls: Tensor, true_values: Tensor, state: Tensor, meas_step: Tensor) Tensor
Updates the resource Tensor, which contains, for each estimation in the batch, the amount of resources consumed up to the point this method is called.
Achtung! This method has to be implemented by the user.
The optimization of the estimation precision and the visualization of the performances of an agent are organized within the precision-resources paradigm. The precision is identified with the loss to be minimized in the training cycle, defined in
loss_function(), but the precisions of two instances of the same metrological task can only be fairly compared if the costs involved in them is the same. This cost is what we call resource. Some examples of resources are the number of measurements on the probe, the number of identical codified states consumed, the amplitude of a signal, the total measurement time, etc. There is no right or wrong resource in an estimation task, it depends on the user choices and on his understanding of the limitations in the laboratory implementation of the task.For each measurement, the method
count_resources()computes a scalar value based on the controls of the measurement, the measurement step counter, and the true values of the parameter. This scalar is interpreted as the partial resources consumed in the measurement
to which the parameters in the call are referring.
These partial
resources are summed step by step to get the total
amount of consumed resources at step
consumed in the measurement
to which the parameters in the call are referring.
These partial
resources are summed step by step to get the total
amount of consumed resources at step  of
the measurement loop in
of
the measurement loop in
execute(), i.e.(1)

The measurement loop stops when the total amount of consumed resources reaches the value of the attribute
max_resourcesof the classSimulationParameters, set by the user.The definition of the resources doesn’t only have an impact on the stopping condition of the measurement loop, but it defines how the performances of an agent are visualized. The function
performance_evaluation()produces a plot of the mean loss for the estimation task as a function of the consumed resources. Different definitions of the methodcount_resources()will produce different plots.resources: Tensor, outcomes: Tensor, controls: Tensor, true_values: Tensor, state: Tensor, meas_step: Tensor,
Parameters
- resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called.
- outcomes: Tensor
The observed outcomes of the measurement. This is a Tensor of shape (bs, 1, outcomes_size) and of type prec. bs, outcomes_size, and prec are attributes of the
PhysicalModelclass.- controls: Tensor
Controls of the last measurement on the probe. It is a Tensor of shape (bs, controls_size) and of type prec, with bs, controls_size, and prec are attributes of the
PhysicalModelclass.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. It is a Tensor of shape (bs, 1, d) and type prec, with bs and d being attributes of the
PhysicalModelclass.- state: Tensor
Current state of the quantum probe, computed from the evolution determined (among other factors) by the encoding of parameters. This is a Tensor of shape (bs, num_systems, state_specifics[“size”]), where state_specifics is an attribute of the
PhysicalModelclass. Its type is state_specifics[“type”].- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32.
Return
- Tensor
Resources consumed in the current measurement step, for each simulation in the batch. It is a Tensor of shape (bs, 1) of type prec.
Examples
For the estimation of a magnetic field with an NV-center, two common choices for the resources are the number of Ramsey measurements, which mean
 , and the employed time,
which is
, and the employed time,
which is  , where
, where  is the interaction time between the magnetic
field and the probe.
is the interaction time between the magnetic
field and the probe.
- initialize_state(parameters: Tensor, num_systems: int) Tensor
Initialization of the probe state.
Achtung! This method must be implemented by the user.
Parameters
- parameters: Tensor
Tensor of shape (bs, num_systems, d) and of type prec, where bs, d, and prec are attribute of the
Simulationclass. These are values for the unknown parameters associated to each of the probe states that must be initialized in this method, be it the “true values” used to simulate the measurement outcomes or the particles in the particle filter ensemble.- num_systems: int
The number of systems to be initialized for each simulation in the batch. This is the size of the second dimension of the Tensor that this method should return.
Returns
- state: Tensor
The initialized state of the probe and/or some classical variable state. This is a Tensor of shape (bs, num_systems, state_specifics[“size”]) of type state_specifics[“type”], where state_specifics is an attribute of the
PhysicalModelclass. It may be desirable to initialize the state of the probe depending on the values of parameters, for example because the encoding has happened outside of the laboratory and we are given the encoded probe state only. However, if the encoding happens in the lab between the measurements it make sense to reset the probe state at the beginning of the estimation with a parameter independent state.
- model(outcomes: Tensor, controls: Tensor, parameters: Tensor, state: Tensor, meas_step: Tensor, num_systems: int = 1) Tuple[Tensor, Tensor]
Description of the encoding and the measurement on the probe. This method returns the probability of observing a certain outcome and the corresponding evolved state after the measurement backreaction.
Achtung! This method must be implemented by the user.
Achtung! This method does not implement any stochastic evolution. All stochastic operations in the measurement of the probe and in the evolution of the state should be defined in the method
perform_measurement().Suppose that the state of the probe after the encoding is
 , where
, where  is parameter and
is parameter and  is control. The probe state
will, in general, depend on the entire history of
past outcomes and controls, but we neglect the
corresponding subscripts to avoid making the notation
too cumbersome. The probe measurement is associated with
an ensemble of positive operators
is control. The probe state
will, in general, depend on the entire history of
past outcomes and controls, but we neglect the
corresponding subscripts to avoid making the notation
too cumbersome. The probe measurement is associated with
an ensemble of positive operators
 , where
, where
 is the outcome and
is the outcome and  is the set of
possible outcomes. According to the laws of quantum
mechanics, the probability of observing the outcome
is then
is the set of
possible outcomes. According to the laws of quantum
mechanics, the probability of observing the outcome
is then(2)

and the backreaction on the probe state after having observed
is(3)
![\rho_{\vec{\theta}, x}' = \frac{M_{y}^{x} \rho_{\vec{\theta}, x}
M_{y}^{x \dagger}}{\text{tr} \left[ M_{y}^{x}
\rho_{\vec{\theta}, x} M_{y}^{x \dagger} \right]} \; .](_images/math/91e49deec5245db42831d991844812803b540493.svg)
Parameters
- outcomes: Tensor
Measurement outcomes. It is a Tensor of shape (batchsize, num_systems, outcomes_size) of type prec, where bs and outcomes_size are attributes of the
PhysicalModelclass.- controls: Tensor
Contains the controls for the measurement. This is a Tensor of shape (bs, num_systems, controls_size) and type prec, where bs and controls_size are attributes of the
PhysicalModelclass.- parameters: Tensor
Values of the unknown parameters. It is a Tensor of shape (bs, num_systems, d) and type prec, where bs and d are attributes of the
PhysicalModelclass.- state: Tensor
Current state of the quantum probe, computed from the evolution determined (among other factors) by the encoding of parameters. This is a Tensor of shape (bs, num_systems, state_specifics[“size”]), where state_specifics is an attribute of the
PhysicalModelclass. Its type is state_specifics[“type”].- meas_step: Tensors
The index of the current measurement on the probe system. The Counting starts from zero. This is a Tensor of shape (bs, num_systems, 1) and of type int32.
Returns
- prob: Tensor
Probability of observing the given vector of outcomes, having done a measurement with the given controls, parameters, and states. It is a Tensor of shape (bs, num_systems) and type prec. bs and prec are attributes of the
PhysicalModelclass.- state: Tensor
State of the probe after the encoding of parameters and the application of the measurement backreaction, associated with the observation of the given outcomes. This is a Tensor of shape (bs, num_systems, state_specifics[“size”]), where state_specifics is an attribute of the
PhysicalModelclass.
- perform_measurement(controls: Tensor, parameters: Tensor, true_state: Tensor, meas_step: Tensor, rangen: Generator) Tuple[Tensor, Tensor, Tensor]
Performs the stochastic extraction of measurement outcomes and updates the state of the probe.
Achtung! This method must be implemented by the user.
Samples measurement outcomes to simulate the experiment and returns them, together with the likelihood of obtaining such outcomes and the evolved state of the probe after the measurement. Typically, this function contains at least one call to the
model()method, which produces the probabilities for the outcome sampling.Achtung! When using the
StatefulPhysicalModelclass in combination withBoundSimulationthe methodperform_measurement()can be implemented to return an outcome extracted from an arbitrary probability distribution, which can be different from the one predicted by the true model of the system. This is used to introduce an importance sampling on the probe trajectories. The log_prob outcome should be the log-likelihood of the outcome according to the modified distribution, while true_state remains the state of the system conditioned on the observation of the outcome. It is important thatmodelimplement the true probability. This feature should be used together with the activation of the flag importance_sampling in the constructor of theBoundSimulationobject, and should not be used for a Bayesian estimation carried out with theSimulationclass.Parameters
- controls: Tensor
Contains the controls for the current measurement. This is a Tensor of shape (bs, 1, controls_size) and type prec, where bs and controls_size are attributes of the
PhysicalModelclass.- parameters: Tensor
Contains the true values of the unknown parameters in the simulations. The observed measurement outcomes must be simulated according to them. It is a Tensor of shape (bs, 1, d) and type prec, where bs and d are attributes of the
PhysicalModelclass. In the estimation, these values are not observable, only their effects through the measurement outcomes are.- true_states: Tensor
The true state of the probe in the estimation, computed from the evolution determined (among other factors) by the encoding of the parameter true_values. Like true_values, this information is not observable. This is a Tensor of shape (bs, 1, state_specifics[“size”]), where state_specifics is an attribute of the
PhysicalModelclass. Its type is state_specifics[“type”].- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. This is a Tensor of shape (bs, 1, 1) and of type int32.
- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- outcomes: Tensor
The observed outcomes of the measurement. This is a Tensor of shape (bs, 1, outcomes_size) and of type prec. bs, outcomes_size, and prec are attributes of the
PhysicalModelclass.- log_prob: Tensor
The logarithm of the probabilities of the observed outcomes. This is a Tensor of shape (bs, 1) and of type prec. bs and prec are attributes of the
PhysicalModelclass.- true_state: Tensor
The true state of the probe, encoded with the parameters true_values, after the measurement backreaction corresponding to outcomes is applied. This is a Tensor of shape (bs, 1, state_specifics[“size”]), where state_specifics is an attribute of the
PhysicalModelclass. Its type is state_specifics[“type”].
- wrapper_count_resources(resources, outcomes, controls, true_values, state, meas_step) Tuple[Tensor]
wrapper_model
stateless_physical_model
Module containing the stateless version
of PhysicalModel.
- class StatelessPhysicalModel(batchsize: int, controls: List[Control], params: List[Parameter], outcomes_size: int = 1, prec: str = 'float64')
Bases:
PhysicalModelAbstract description of a stateless quantum probe.
Constructor of the
StatelessPhysicalModelclass.Parameters
- batchsize: int
Batch size of the physical model, i.e., the number of simultaneous estimations in the simulation.
- controls: List[
Control] A list of controls for the probe (the buttons and knobs of the experiment).
- params: List[
Parameter] A list of
Parameterobjects that represent the unknowns of the estimation.- outcomes_size: int = 1
Number of scalars collected in a measurement on the probe.
- prec: str = “float64”
Floating point precision of the controls, outcomes, and parameters. Can be either “float32” or “float64”.
- count_resources(resources: Tensor, outcomes: Tensor, controls: Tensor, true_values: Tensor, meas_step: Tensor) Tensor
Updates the resource Tensor, which contains, for each estimation in the batch, the amount of resources consumed up to the point this method is called.
Achtung! This method has to be implemented by the user.
The optimization of the estimation precision and the visualization of the performances of an agent are organized within the precision-resources paradigm. The precision is identified with the loss to be minimized in the training cycle, defined in
loss_function(), but the precisions of two instances of the same metrological task can only be fairly compared if the costs involved in them is the same. This cost is what we call resource. Some examples of resources are the number of measurements on the probe, the number of identical codified states consumed, the amplitude of a signal, the total measurement time, etc. There is no right or wrong resource in an estimation task, it depends on the user choices and on his understanding of the limitations in the laboratory implementation of the task.For each measurement, the method
count_resources()computes a scalar value based on the controls of the measurement, the measurement step counter, and the true values of the parameter. This scalar is interpreted as the partial resources consumed in the measurement
to which the parameters in the call are referring.
These partial
resources are summed step by step to get the total
amount of consumed resources at step of
the measurement loop in
execute(), i.e.(4)
The measurement loop stops when the total amount of consumed resources reaches the value of the attribute
max_resourcesof the classSimulationParameters, set by the user.The definition of the resources doesn’t only have an impact on the stopping condition of the measurement loop, but it defines how the performances of an agent are visualized. The function
performance_evaluation()produces a plot of the mean loss for the estimation task as a function of the consumed resources. Different definitions of the methodcount_resources()will produce different plots.Parameters
- resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called.
- outcomes: Tensor
The observed outcomes of the measurement. This is a Tensor of shape (bs, 1, outcomes_size) and of type prec. bs, outcomes_size, and prec are attributes of the
PhysicalModelclass.- controls: Tensor
Controls of the last measurement on the probe. It is a Tensor of shape (bs, controls_size) and of type prec, with bs, controls_size, and prec are attributes of the
PhysicalModelclass.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. It is a Tensor of shape (bs, 1, d) and type prec, with bs and d being attributes of the
PhysicalModelclass.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32.
Return
- Tensor
Resources consumed in the current measurement step, for each simulation in the batch. It is a Tensor of shape (bs, 1) of type prec.
Examples
For the estimation of a magnetic field with an NV-center, two common choices for the resources are the number of Ramsey measurements, which mean
, and the employed time,
which is , where
is the interaction time between the magnetic
field and the probe.
- model(outcomes: Tensor, controls: Tensor, parameters: Tensor, meas_step: Tensor, num_systems: int = 1) Tensor
Description of the encoding and the measurement on the probe. This method returns the probability of observing a certain outcome after a measurement.
Achtung! This method must be implemented by the user.
Achtung! This method does not implement any stochastic evolution. The stochastic extraction of the outcomes should be defined in the method
perform_measurement().Suppose that the state of the probe after the encoding is
, where
is parameter and is control.
The probe measurement is associated with
an ensemble of positive operators
, where
is the outcome and is the set of
possible outcomes. According to the laws of quantum
mechanics, the probability of observing the outcome
is then(5)

Parameters
- outcomes: Tensor
Measurement outcomes. It is a Tensor of shape (bs, num_systems, outcomes_size) of type prec, where bs, outcomes_size, and prec are attributes of the
PhysicalModelclass.- controls: Tensor
Contains the controls for the measurement. This is a Tensor of shape (bs, num_systems, controls_size) and type prec, where bs, controls_size, and prec are attributes of the
PhysicalModelclass.- parameters: Tensor
Values of the unknown parameters. It is a Tensor of shape (bs, num_systems, d) and type prec, where bs, d, and prec are attributes of the
PhysicalModelclass.- meas_step: Tensors
The index of the current measurement of the probe system. The counting starts from zero. This is a Tensor of shape (bs, num_systems, 1) and of type int32.
Returns
- prob: Tensor
Probability of observing the given outcomes vector, having done a measurement with the given controls and parameters. It is a Tensor of shape (bs, num_systems) and of type prec. bs and prec are attributes of the
PhysicalModelclass.
- perform_measurement(controls: Tensor, parameters: Tensor, meas_step: float, rangen: Generator) Tuple[Tensor, Tensor]
Performs the stochastic extraction of measurement outcomes.
Achtung! This method must be implemented by the user.
Samples measurement outcomes to simulate the experiment and returns them, together with the likelihood of obtaining such outcomes. Typically, this function contains at least one call to the
model()method, which produces the probabilities for the outcome sampling.Parameters
- controls: Tensor
Contains the controls for the current measurement. This is a Tensor of shape (bs, 1, controls_size) and type prec, where bs and controls_size are attributes of the
PhysicalModelclass.- parameters: Tensor
Contains the true values of the unknown parameters in the simulations. The observed measurement outcomes must be simulated according to them. It is a Tensor of shape (bs, 1, d) and type prec, where bs and d are attributes of the
PhysicalModelclass. In the estimation, these values are not observable, only their effects through the measurement outcomes are.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. This is a Tensor of shape (bs, 1, 1) and of type int32.
- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- outcomes: Tensor
The observed outcomes of the measurement. This is a Tensor of shape (bs, 1, outcomes_size) and of type prec. bs, outcomes_size, and prec are attributes of the
PhysicalModelclass.- log_prob: Tensor
The logarithm of the probabilities of the observed outcomes. This is a Tensor of shape (bs, 1) and of type prec. bs and prec are attributes of the
PhysicalModelclass.
- wrapper_count_resources(resources, outcomes, controls, true_values, state, meas_step) Tuple[Tensor]
wrapper_model
particle_filter
Submodule containing the class ParticleFilter
necessary for Bayesian estimation.
- class ParticleFilter(num_particles: int, phys_model: PhysicalModel, resampling_allowed: bool = True, resample_threshold: float = 0.5, resample_fraction: float = 0.98, alpha: float = 0.5, beta: float = 0.98, gamma: float = 1.0, scibior_trick: bool = True, trim: bool = True, prec: str = 'float64')
Bases:
objectParticle filter object, with methods to reset the particle ensemble and perform Bayesian filtering for quantum metrology.
Given the tuple of unknown parameters
 ,
in the Bayesian framework we start from a prior
,
in the Bayesian framework we start from a prior
 and update it after each observation
through the Bayes rule. In simulating such procedure
(called Bayesian filtering) we need a computer
representation of a generic probability distribution
on the parameters. We can approximate a distribution
with a weighted sum of delta functions
as follows:
and update it after each observation
through the Bayes rule. In simulating such procedure
(called Bayesian filtering) we need a computer
representation of a generic probability distribution
on the parameters. We can approximate a distribution
with a weighted sum of delta functions
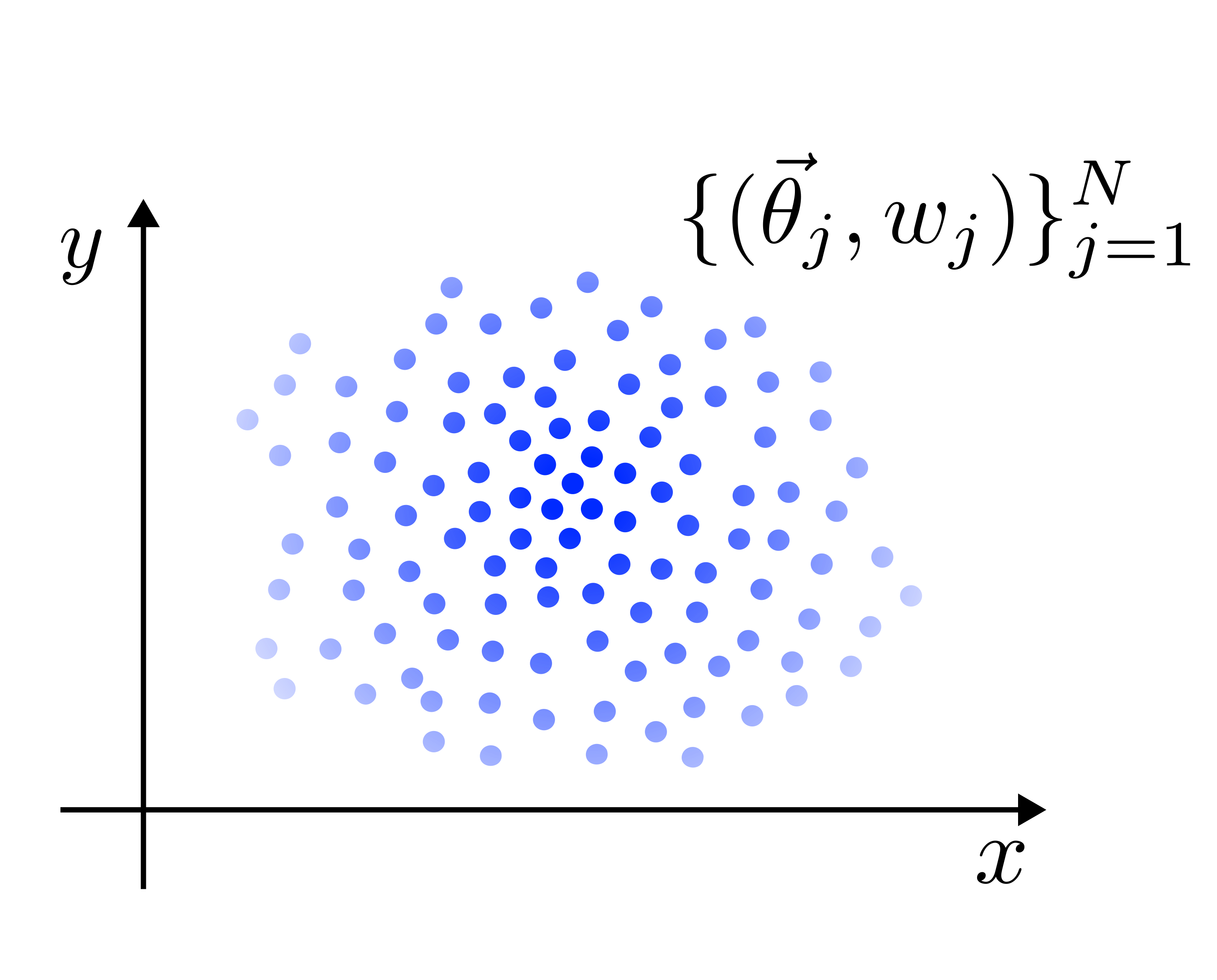
as follows:(6)

where the vectors
 are called particles,
while the real numbers
are called particles,
while the real numbers  are the weights.
The integer
are the weights.
The integer  is the attribute np of the
is the attribute np of the
ParticleFilterobject. The core idea is that the posterior distribution is represented by an ensemble of particles and weights .
The Bayesian filtering techniques that use this kind of
representations for the posterior are called particle
filter methods.
.
The Bayesian filtering techniques that use this kind of
representations for the posterior are called particle
filter methods.In the figure, we represent the ensemble of a two-dimensional particle filter, where the intensity of the color is proportional to the weight associated with each particle.
The update of the posterior in the particle filter becomes the update of the weights
.Attributes
- bs: int
Batchsize of the particle filter, i.e. number of Bayesian estimations performed simultaneously.
- np: int
Parameter num_particles passed to the constructor of the class. It is the number of particles in the ensemble.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe passed to the
ParticleFilterconstructor. It also contains the description of the parameters to estimate, on the basis of which the particles of the ensemble are initialized.- resampling: bool
Flag resampling_allowed passed to the constructor of
ParticleFilter.Achtung! This attribute has no effect inside the methods of the
ParticleFilter. Calling the methodfull_resampling()will resample the particles if needed also with resampling=False.- state_size: int
Size of the state of the probe, it is phys_model.state_specifics[“size”], where phys_model is the attribute of
ParticleFilter.- state_type: str
Type of the state vector of the probe, it is phys_model.state_specifics[“type”], where phys_model is the attribute of
ParticleFilter.- d: int
Number of unknown parameters of the simulation, it is the length of the attribute params.
- prec: str
Floating point precision of the parameter values. Can be either float32 or float64. It is the parameter prec passed to the constructor.
Notes
This class can deal with a whole batch of particle filter ensembles that are updated simultaneously. The batchsize attribute bs is taken from phys_model in the initialization.
This implementation of the particle filter is fully differentiable and can, therefore, be used in the training loop of a neural network agent that controls the experiment. It is trivial to see that the Bayes update is differentiable, while the differentiability of the resampling 3 is achieved through a combination of soft resampling 4 and the method of Ścibior and Wood 5.
Constructor of the
ParticleFilterclass.Parameters
- num_particles: int
Number of particles in the ensemble of the particle filter.
- phys_model:
PhysicalModel Contains the physics of the quantum probe and the methods to operate on its state and compute the probabilities of observing a certain outcome in a measurement. This object is used in the
apply_measurement()method, which performs the Bayesian update on the particle weights.- resampling_allowed: bool = True
Controls whether the resampling is allowed or not for a particular instance of
ParticleFilter. The typical case in which we set resampling_flag=False is that of hypothesis testing, where we have a single discrete parameter and num_particles equals the number of hypotheses.This flag isn’t used directly in this class, but in the
StatelessSimulationandStatefulSimulationclasses, which use the methods ofParticleFilter.- resample_threshold: float = 0.5
The method
full_resampling()verifies the need for resampling for a certain particle filter ensemble according to the effective particle number, defined as(7)

Indicating with
 the resample_threshold,
the particle filter identifies an ensemble as
in need of resampling when
the resample_threshold,
the particle filter identifies an ensemble as
in need of resampling when
 .
.- resample_fraction: float = 0.98
The method
full_resampling()triggers the resampling for the whole batch of particle filter ensembles if at least a fraction resample_fraction of simulations are in need of resampling. Also those simulations in the batch that don’t need resampling will be resampled.- alpha: float = 0.5
In the method
resample()an importance sampling of the particles is performed, where the extraction is done from a distribution, being the one defined by the ensemble mixed with a uniform distribution on the particles. This procedure, called soft resampling, aims to make the update step differentiable. The mixing coefficient is the parameter alpha, and it is indicated with in the equations.
in the equations.This parameter quantitatively controls the flow of derivatives through the resampling routine and the effectiveness of the resampling. With alpha=1, regular resampling without mixing occurs, but no derivatives can flow through this operation. With alpha=0, differentiability is achieved, but no resampling is done. There is a tradeoff between the efficiency of the soft resampling and its differentiability.
- beta: float = 0.98
In the method
resample(), a Gaussian perturbation of the particles obtained from the soft resampling is performed. The intensity of this perturbation is controlled by the parameter 1.0-beta, which is indicated by in the equations.
in the equations.- gamma: float = 1.0
This parameter controls the fraction of num_particles that are extracted in the soft resampling. The remaining fraction of particles, 1.0-gamma, are newly generated from a Gaussian distribution having the same mean and variance as the posterior distribution before the resampling. This parameter, like alpha and beta, regulates the behavior of the
resample()method and is indicated by in the equations.
in the equations.Achtung! Proposing new particles during a resampling won’t work when one ore more discrete parameters are present. The advice in these cases is to keep gamma=1.0.
- scibior_trick: bool = True
This flag controls the use of the method proposed by Ścibior and Wood to make the resampling differentiable. It can be used alone or together with soft resampling to improve the flow of the gradient through the particle ensemble resampling steps.
- trim: bool = True
After the Gaussian perturbation of the particles or their extraction from scratch from a Gaussian, they may fall outside the admissible bounds for the parameters. If trim=True, they are cast again inside the bounds using the function
trim_single_param().- prec: str = “float64”
This parameter indicates the floating-point precision of the particles and weights, it can be either float64 or float32.
- 3
Granade et al, New J. Phys. 14 103013 (2012).
- 4
Ma, P. Karkus, D. Hsu, and W. S. Lee, arXiv:1905.12885 (2019).
- 5
Ścibior, F. Wood, arXiv:2106.10314 (2021).
- apply_measurement(weights: Tensor, particles: Tensor, state_ensemble: Tensor, outcomes: Tensor, controls: Tensor, meas_step: Tensor) Tuple[Tensor, Tensor]
Bayesian update of the weights of the particle filter.
Consider
the outcome of the last observation
on the probe and the control.
The weights are updated as(8)

where
 is the probability
of observing the outcome under the control ,
and
is the probability
of observing the outcome under the control ,
and  the j-th particles with its associated
state
the j-th particles with its associated
state  before the encoding and the measurement.
before the encoding and the measurement.Parameters
- weights: Tensor
A Tensor of weights with shape (bs, np) and type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
A Tensor of particles with shape (bs, np, d) and type prec. bs, np, d, and prec are attributes of the
ParticleFilterclass.- state_ensemble: Tensor
The state of the probe system before the last measurement for each particle. It is a Tensor of shape (bs, np, state_size) and of type state_type. Here, state_size and state_type are attributes of
ParticleFilter. In the Bayes rule formula, the state_ensemble is indicated with.- outcomes: Tensor
The outcomes of the last measurement on the probe. It is a Tensor of shape (bs, phys_model.outcomes_size) and of type prec. In the Bayes rule formula, it is indicated with
.- controls: Tensor
The controls of the last measurement on the probe. It is a Tensor of shape (bs, phys_model.controls_size) and of type prec. In the Bayes rule formula, it is indicated with
.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32.
Returns
- weights: Tensor
Updated weights after the application of the Bayes rule. It is a Tensor of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- state_ensemble: Tensor
Probe state associated to each particle after the measurement backreaction associated to outcomes. It is a Tensor of shape (bs, np, state_size) and of type state_type. bs, np, state_size, and state_type are attributes of the
ParticleFilterclass.
Notes
If an outcome is observed that is not compatible with any of the particles, this method ignores the measurements for the corresponding batch element. Such observation is treated as an outlier.
- check_resampling(weights: Tensor, count_for_resampling: Tensor) Tensor
Checks the resampling condition on the effective number of particles for each simulation in the batch.
A particle filter ensemble is in need of resampling when the effective number of particles, defined in Eq.7, is less then a fraction resample_threshold of the total particle number.
Parameters
- weights: Tensor
Tensor of weights of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- count_for_resampling: Tensor
Tensor of bool of shape (bs, 1), that says whether a certain ensemble in the batch should be counted or not in the total number of active simulation. Some estimations in the batch may have already terminated and are not to be counted in assessing the need of launching the resampling routine. If a fraction resample_fraction of the active simulations needs resampling then the whole batch is resampled.
Returns
- trigger_resampling: Tensor
Tensor of shape (bs, ) and of type bool that indicates whether the corresponding batch element should undergo resampling or not.
- compute_covariance(weights: Tensor, particles: Tensor, batchsize: Optional[Tensor] = None, dims: Optional[int] = None) Tensor
Computes the covariance matrix of the Bayesian posterior distribution.
The empirical covariance matrix of the particle filter ensemble is defined as:
(9)

where
 is the mean value
returned by the method
is the mean value
returned by the method compute_mean().Parameters
- weights: Tensor
A Tensor of weights of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
A Tensor of particles of shape (bs, np, d) and of type prec, bs, np, d, and prec are attributes of the
ParticleFilterclass.- dims: int, optional
This method can deal with a last dimension for the particles parameter different from the attribute d of the
ParticleFilterobject. If this optional parameter is passed to the method call, then the shape of particles is expected to be (bs, np, dims). Its typical use is when we compute the covariance of a subset only of the parameters.
Returns
- Tensor
A Tensor of shape (bs, d, d) of type prec with the covariance matrix of the Bayesian posterior for each ensemble in the batch. if dims was passed to the function call then the outcome Tensor has shape (bs, dims, dims).
- compute_max_weights(weights: Tensor, particles: Tensor) Tensor
Returns the particle with the maximum weight in the ensemble.
Achtung! This method does not return the true maximum of the posterior if the particles are not equidistant in the parameter space. In general, it should not be used if the resampling is active or if the initialization of the particles in the ensemble is stochastic. Its use case is for pure hypothesis testing, where it returns the most plausible hypothesis.
Parameters
- weights: Tensor
A Tensor of weights with shape (bs, np) and type prec.
- particles: Tensor
A Tensor of particles with shape (bs, np, d) and type prec. Here, d is the attribute of the
ParticleFilterobject.
Returns
- Tensor
A Tensor of shape (bs, d) and type prec with the particle having the highest weight for each ensemble in the batch.
- compute_mean(weights: Tensor, particles: Tensor, batchsize: Optional[Tensor] = None, dims: Optional[int] = None) Tensor
Computes the empirical mean of the unknown parameters based on the particle filter posterior distribution.
The mean
is computed as follows:(10)

 are the weights of the particles,
and are the particles.
are the weights of the particles,
and are the particles.Parameters
- weights: Tensor
A Tensor of weights with shape (bs, np) and type prec.
- particles: Tensor
A Tensor of particles with shape (bs, np, d) and type prec, where d is the attribute of the
ParticleFilterobject.- dims: int, optional
This method can handle a particles parameter with a last dimension different from the attribute d of the
ParticleFilterclass. If dims is passed to the method call, the shape of particles is expected to be (bs, np, dims). This parameter is typically used when computing the mean of a subset of the parameters.
Returns
- Tensor
The mean of the unknown parameters computed on the posterior distribution represented by weights and particles. It is a Tensor of shape (bs, d), or possibly (bs, dims) if dims is defined. Its type is prec.
- compute_state_mean(weights: Tensor, state_ensemble: Tensor, batchsize: Tensor) Tensor
Compute the mean state of a particle filter ensemble.
Given the weight
and state
of the j-th particle
in the ensemble, the mean state is defined as:(11)

Parameters
- weights: Tensor
Tensor of particle weights with shape (bs, np) and type prec.
- state: Tensor
Tensor of states for the probe, with shape (bs, np, state_size) and type state_type.
Returns
- Tensor
Mean state for each estimation in the batch computed with the posterior distribution. It is a Tensor of shape (bs, state_size) and type state_type. state_size and state_type are attributes of the
ParticleFilterclass.
- extract_particles(weights: Tensor, particles: Tensor, num_extractions: int, rangen: Generator) Tensor
Extracts num_extractions particles from the posterior distribution represented by the particle filter ensemble.
Parameters
- weights: Tensor
A Tensor of weights with shape (bs, np) and type prec.
- particles: Tensor
A Tensor of particles with shape (bs, np, d) and type prec. Here, d is the attribute of the
ParticleFilterobject.- num_extraction: int
The number of particles to be stochastically extracted.
- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- Tensor
A Tensor of shape (bs, num_extractions, d), of type prec, containing the num_extraction particles sampled from the posterior distribution.
- full_resampling(weights: Tensor, particles: Tensor, count_for_resampling: Tensor, rangen: Generator) Tuple[Tensor, Tensor, Tensor]
Checks the resampling condition on the effective number of particles and applies the resampling if needed.
A particle filter ensemble is in need of resampling when the effective number of particles, defined in Eq.7, is less then a fraction resample_threshold of the total particle number. The whole batch of particle filters gets resampled if at least a fraction resample_fraction of the active simulations, defined by count_for_resampling, is in need of resampling.
Parameters
- weights: Tensor
Tensor of weights of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
Tensor of particles of shape (bs, np, d) and of type prec. bs, np, d, and prec are attributes of the
ParticleFilterclass. d is the attribute ofParticleFilter.- count_for_resampling: Tensor
Tensor of bool of shape (bs, 1), that says whether a certain ensemble in the batch should be counted or not in the total number of active simulation. Some estimations in the batch may have already terminated and are not to be counted in assessing the need of launching the resampling routine. If a fraction resample_fraction of the active simulations needs resampling then the whole batch is resampled.
- rangen: Generator
Random number generator from the module
tensorflow.random.
Returns
- weights: Tensor
Resampled weights. Tensor of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
Resampled particles. Tensor of shape (bs, np, d) and of type prec. bs, np, d, and prec are attributes of the
ParticleFilterclass.- resample_flag: Tensor
Tensor of shape (, ) of type bool that informs whether the resampling has been executed or not.
- partial_resampling(weights: Tensor, particles: Tensor, count_for_resampling: Tensor, rangen: Generator) Tuple[Tensor, Tensor, Tensor]
Checks the resampling condition on the effective number of particles and applies the resampling if needed.
A particle filter ensemble is in need of resampling when the effective number of particles, defined in Eq.7, is less then a fraction resample_threshold of the total particle number. The whole batch of particle filters gets resampled if at least a fraction resample_fraction of the active simulations, defined by count_for_resampling, is in need of resampling.
Parameters
- weights: Tensor
Tensor of weights of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
Tensor of particles of shape (bs, np, d) and of type prec. bs, np, d, and prec are attributes of the
ParticleFilterclass. d is the attribute ofParticleFilter.- count_for_resampling: Tensor
Tensor of bool of shape (bs, 1), that says whether a certain ensemble in the batch should be counted or not in the total number of active simulation. Some estimations in the batch may have already terminated and are not to be counted in assessing the need of launching the resampling routine. If a fraction resample_fraction of the active simulations needs resampling then the whole batch is resampled.
- rangen: Generator
Random number generator from the module
tensorflow.random.
Returns
- weights: Tensor
Resampled weights. Tensor of shape (bs, np) and of type prec. bs, np, and prec are attributes of the
ParticleFilterclass.- particles: Tensor
Resampled particles. Tensor of shape (bs, np, d) and of type prec. bs, np, d, and prec are attributes of the
ParticleFilterclass.
- recompute_state(index: Tensor, particles: Tensor, hist_control_rec: Tensor, hist_outcomes_rec: Tensor, hist_continue_rec: Tensor, hist_step_rec: Tensor, num_steps: int) Tensor
Routine that recomputes the state ensemble starting from the measurement outcomes and the controls.
When a resampling of the particle filter ensemble is carried out, a new set of particles is produced. In this situation state_ensemble generated by
initialize_state()and updated in the measurement loop inside the methodexecute()still refers to the old particles. The only way to align the state ensemble with the new particles is to re-initialise and re-evolve the state ensemble with the applied controls, the observed outcomes, and the new particles. That is the role of this method.Parameters
- index: Tensor
Tensor of shape (,) and type int32 that contains the number of iterations of the measurement loop in
execute(), as this method is called.- particles: Tensor
Tensor of particles of shape (bs, np, d) and of type prec. d is an attribute of
ParticleFilter.- hist_outcomes_rec: Tensor
Tensor of shape (num_step, bs, phys_model.outcomes_size) and of type prec. It contains the history of the outcomes of the measurements for all the estimations in the batch up to the point at which this method is called. It is generated automatically in the
execute()method.- hist_control_rec: Tensor
Tensor of shape (num_steps, bs, phys_model.control_size) and of type prec. It contains the history of the controls of the measurements for all the estimations in the batch up to the point at which this method is called. It is generated automatically in the
execute()method.- hist_step_rec: Tensor
Tensor of shape (num_steps, bs, 1) that contains, for each loop of the measurement cycle, the index of the last measurement performed on each estimation in the batch. Different estimations can terminate with a different number of total measurements performed. This Tensor is fundamentally a table that shows for each loop of the measurement cycle (row index) the number of measurements performed up to that point for each estimation (column index). Because for some loops the measurement might be applied only to a subset of estimations, some cells can show a number of measurements lower than the current number of completed loops in the measurement cycle. This Tensor is generated automatically in the
execute()method.- hist_continue_rec: Tensor
A Tensor of shape (num_steps, bs, 1) and type int32, hist_continue_rec is a flag Tensor indicating whether a simulation in the batch is ended or not. This flag is necessary because different simulations may stop at different numbers of measurements. The typical column of hist_continue_rec consists of a series of contiguous ones, say in number of M, followed by zeros until the end of the row. This tells us that the particular simulation to which the row refers, consisted of M measurements so far. In recomputing the state with different values for the particles, M measurement should be performed for that particular simulation. The parameter hist_continue_rec is generated automatically in the Simulation.execute method and could be easily derived from hist_step_rec, which contains more information.
- batchsize: Tensor
Dynamical batchsize of the recomputed states.
- num_steps: int
The maximum number of steps in the training loop. It is the attribute num_steps of the data class
SimulationParameters.
Returns
- state_ensemble: Tensor
The state of the quantum probe associated with each entry of particles, that has been recomputed using the applied controls and the observed outcomes. Each entry of state_ensemble is the state of the probe computed as if the true values of the parameters were the particles of the ensemble. When these are resampled, the states do not refer anymore to the correct values of the parameters, and the only way to realign them is to recompute them from scratch. state_ensemble is a Tensor of shape (bs, np, state_size) and type state_type, where state_size and state_type are attributes of
ParticleFilter.
Notes
The stopping condition in the measurement loop, which determines the number of measurements for an estimation, depends on the number of computed resources, which depends only on the applied controls and observed outcomes. For this reason, it is possible to reuse the objects hist_step_rec and hist_continue_rec, which were generated before the resampling. For the same reason, these objects are actually superfluous in the function call, as they could be recomputed from the hist_outcomes_rec and hist_continue_rec parameters.
- resample(weights: Tensor, particles: Tensor, rangen: Generator, batchsize: Optional[Tensor] = None) Tuple[Tensor, Tensor]
Resample routine of the particle filter.
The resampling procedure works in three steps. First, we mix the probability distribution on the particles represented by the weights
with a uniform distribution and construct the
soft-weights  defined as:
defined as:(12)

The new particles
 are resampled
from the ensemble
are resampled
from the ensemble  and the new weight associated with each resampled particle is:
and the new weight associated with each resampled particle is:(13)

where
 is the original index in the
old ensemble of the j-th particle in the new ensemble.
The function
is the original index in the
old ensemble of the j-th particle in the new ensemble.
The function  is in general neither injective
nor surjective. Only a fraction gamma of the total particles
np is resampled in this way, and their weights are normalized
such that they sum to gamma, i.e.
is in general neither injective
nor surjective. Only a fraction gamma of the total particles
np is resampled in this way, and their weights are normalized
such that they sum to gamma, i.e.(14)

The second step is to perturb the newly extracted particles
as follows:(15)

where
is the mean value of the
parameters calculated from the ensemble before
the resampling with the method compute_mean(), and is a random variable extracted
from a Gaussian distribution, i.e.
is a random variable extracted
from a Gaussian distribution, i.e.(16)

with
 being the covariance matrix
of the ensemble, computed with the method
being the covariance matrix
of the ensemble, computed with the method
compute_covariance(). The third and last step of the resampling routine is to propose new particles. These are again extracted from a Gaussian distribution, i.e.(17)

A number
 of particles are sampled
in this way with
being the total number of particles np. Their weights
are uniform and normalized to
of particles are sampled
in this way with
being the total number of particles np. Their weights
are uniform and normalized to  , so that
together with the particles produced in the first two
steps, their weights sum to one.
, so that
together with the particles produced in the first two
steps, their weights sum to one.Parameters
- weights: Tensor
Tensor of weights of shape (bs, np) and of type prec.
- particles: Tensor
Tensor of particles of shape (bs, np, d) and of type prec. d is the attribute of
ParticleFilter.- rangen: Generator
Random number generator from the module
tensorflow.random.
Returns
- new_weights: Tensor
Resampled weights. Tensor of shape (bs, np) and of type prec.
- new_particles: Tensor
Resampled particles. Tensor of shape (bs, np, d) and of type prec.
Notes
It is possible that the soft resampling produces an invalid set of new weights (i.e., all zeros) for cases where there are very few particles and highly concentrated weights. In such limit cases, the soft resampling is aborted, and a normal resampling (without mixing with the uniform distribution) is executed to ensure that valid weights are produced.
- reset(rangen: Generator) Tuple[Tensor, Tensor]
Initializes the particles and the weights of the particle filter ensemble, both uniformly.
Parameters
- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- weights: Tensor
Contains the weights of the particles initialized to 1/np, where np is an attribute of
ParticleFilter. It is a Tensor of shape (bs, np) and type prec, where the first dimension is the number of estimations performed in the batch simultaneously (the batchsize).- particles:
Contains the particles extracted uniformly within the admissible bounds of each parameter. It is a Tensor of shape (bs, np, d), of type prec, where d is an attribute of
ParticleFilter.
Notes
This method calls the
reset()methods of eachParameterobject in the attribute params.
simulation_parameters
Module containing the SimulationParameters
dataclass.
- class SimulationParameters(sim_name: str, num_steps: int, max_resources: float, resources_fraction: float = 1.0, prec: str = 'float64', stop_gradient_input: bool = True, loss_logl_outcomes: bool = True, loss_logl_controls: bool = False, log_loss: bool = False, cumulative_loss: bool = False, stop_gradient_pf: bool = False, baseline: bool = False, permutation_invariant: bool = False)
Bases:
objectFlags and parameters to tune the
Simulationclass.This dataclass contains the attributes
num_steps,max_resources, andresources_fractionthat determine the stopping condition of the measurement loop in theexecute()method, some flags that regulate the gradient propagation and the choice of the loss in the training, and the name of the simulation in thesim_nameattribute, along with the numerical precision of the simulation inprec.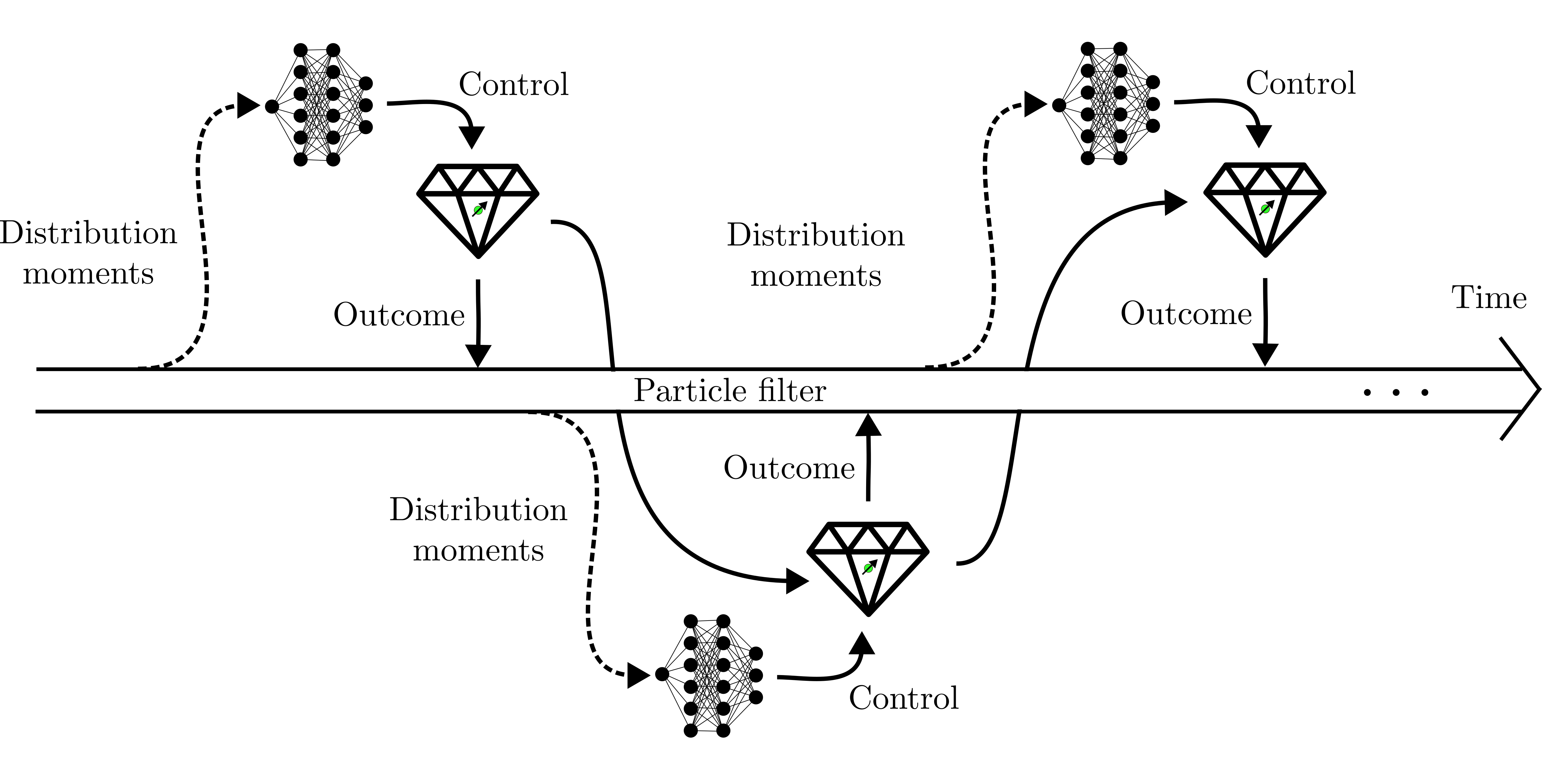
This picture represents schematically the default setting of the gradient propagation in the training. The solid arrows are the flows of information along which the gradient is propagated, while the dashed lines are the ones along which the gradient is not computed. By default the gradient is propagated along the particle filter, whose evolving state is represented by the thick blank line across the picture, along the evolving state of the probe, and through the neural network. The backpropagation of the gradient goes in the opposite direction of the information flow.
For a certain estimation in the batch we will refer to the loss produced by the method
loss_function()with the symbol , with
, with
 , containing
the list of measurement outcomes
, containing
the list of measurement outcomes
 up to step
up to step
 , and the true values
of the unknown parameters to be
estimated. The vector
, and the true values
of the unknown parameters to be
estimated. The vector  contains
all the degrees of freedom of the control
strategy. In case of a neural network these are
the weights and the biases. The loss to be
optimized is then the average of
on a batch
of estimations, i.e.
contains
all the degrees of freedom of the control
strategy. In case of a neural network these are
the weights and the biases. The loss to be
optimized is then the average of
on a batch
of estimations, i.e.(18)

where
 is the batchsize.
If the flag
is the batchsize.
If the flag cumulative_lossis deactivated the loss is computed at the end of the simulation, which is triggered when at least a fractionresources_fractionof estimations in the batch have terminated or when the maximum number of stepsnum_stepsin the measurement loop has been achieved. If an estimation in the batch has terminated because of the resources requirements, the last estimator before the termination is used to compute the mean loss.- baseline: bool = False
If both this flag and the attribute
loss_logl_outcomesare True then the loss of Eq.25 is changed to(19)
![\widetilde{\ell} (\omega, \vec{\lambda}) :=
\ell (\omega, \vec{\lambda})+
\text{sg}[{\ell (\omega, \vec{\lambda})} -
\mathcal{B}]
\log P(\vec{y}|\vec{\theta}, \vec{\lambda}) \; ,](_images/math/b5ead65aee140c57bda7b8ecfe9587789808238e.svg)
with
(20)

The additional term should reduce the variance of the gradient computed from the batch. The baseline
 is recomputed for each step of
the measurement loop.
is recomputed for each step of
the measurement loop.
- cumulative_loss: bool = False
With this flag on the loss of Eq.18 is computed after each measurement and accumulated, so that the quantity that is differentiated for the training at the end of the loop in
execute()is(21)

The maximum number of measurement performed is
 , but some estimations in the batch might
terminate with less measurements. In any case the last
estimator
, but some estimations in the batch might
terminate with less measurements. In any case the last
estimator  from each simulation
in the batch is used to compute the mean loss in all the
subsequent steps.
from each simulation
in the batch is used to compute the mean loss in all the
subsequent steps.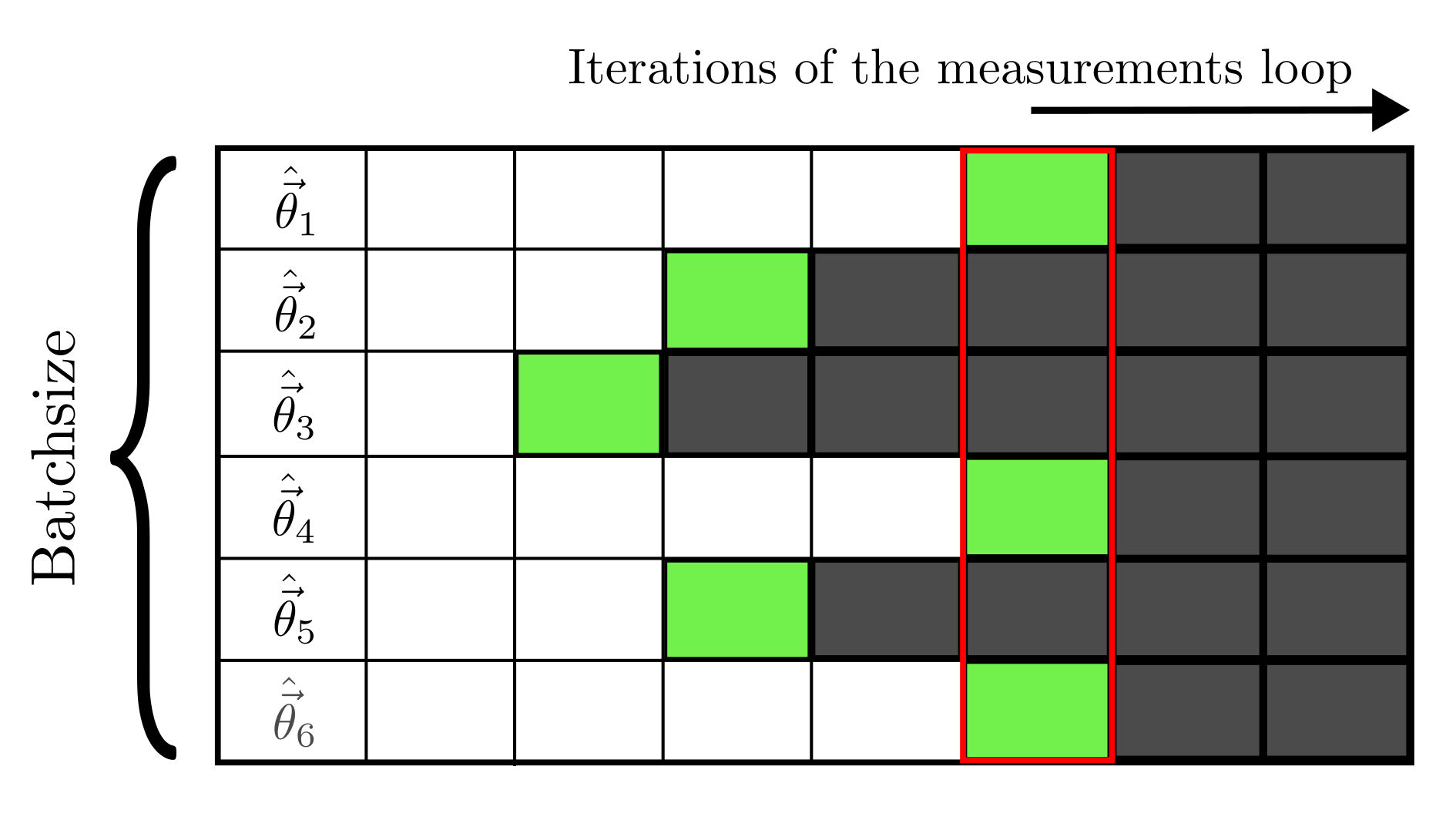
In the picture a cells of the table contains an estimator for the unknown parameters. The rows are the different simulations in the batch and the columns the steps of the measurement cycle. The current measurements step is indicated with the red box. The cells highlighted in grey are those without an estimator, either because it is not yet been computed or because the estimation is already finished for that particular batch element. In green are highlighted the
 estimators that are used in the computation of
the mean loss at the current step. For the third
estimation in the batch, that is already terminated,
the most recent version of
estimators that are used in the computation of
the mean loss at the current step. For the third
estimation in the batch, that is already terminated,
the most recent version of  is used for computing the mean loss in all the
steps after its termination.
is used for computing the mean loss in all the
steps after its termination.It follows that the last estimator of those simulations that have already exhausted the resources appear multiple times in the evaluation of the loss.
Mixing precisions that refer to different number of measurements might not be a fair way to compute the loss in the metrological task. In this case the user should define the loss function so that it contains a normalization factor
 ,
that should be of the order of magnitude of the
expected loss, i.e.
,
that should be of the order of magnitude of the
expected loss, i.e.(22)

The cumulative loss is then
(23)

Achtung! This flag has no effect on a
BoundSimulationobject. For which the Fisher information on the probe trajectory is already a sort of cumulative loss.
- log_loss: bool = False
If this flag is True, then the used loss is the logarithm of
 in Eq.18. In this case, if the flags
in Eq.18. In this case, if the flags
loss_logl_controlsandloss_logl_outcomesare also activated, the simulation modifies accordingly the log-likelihood terms to account for the extra logarithm in the definition of the loss. This flag can be used in conjunction withcumulative_lossto weight in the precisions at all steps in the training, while avoiding the use of a reference precision .
The cumulative logarithmic loss would be
.
The cumulative logarithmic loss would be(24)
![\mathcal{L}_{\text{log}} (\vec{\lambda}) = \frac{1}{T}
\sum_{t=0}^{T-1} \log \left[ \frac{1}{B}
\sum_{k=1}^B \ell (\omega_k^t, \vec{\lambda}) \right] \; .](_images/math/e226bacd5200dd062c5e6038b410049d178288d4.svg)
- loss_logl_controls: bool = False
If one ore more controls are discrete, that is, their flag continuous of the
Controlclass is False, then they are probably extracted stochastically from a probability distribution produced by the control strategy. If this is a neural network for example, its output could be the categorical distribution from which the controls are extracted, instead of the controls themselves. In such cases the callable attribute control_strategy of theSimulationclass takes as input the random number generator rangen alongside input_tensor and returns controls and log_prob_control, respectively the values of the controls and the logarithm of the probability of having extracted the said values.If this flag is True, then log_prob_control is mixed with the loss to compute the correct gradient. This means that an extra terms analogous to the one in Eq.25 is added to the loss, which refers to the controls instead of the outcomes.
This option should be activated only if the controls are generated stochastically.
- loss_logl_outcomes: bool = True
If True the logarithm of the likelihood of the observed measurement outcomes is mixed with the loss
in order to compute the correct gradient.
The modified loss is(25)
![\widetilde{\ell} (\omega, \vec{\lambda}) :=
\ell (\omega, \vec{\lambda})+
\text{sg}[{\ell (\omega, \vec{\lambda})}]
\log P(\vec{y}|\vec{\theta}, \vec{\lambda}) \; .](_images/math/0eb803661ecf2745e844ab06f93c189eed375971.svg)
The additional term is needed in order to propagate the gradient through the physical model of the probe, described by the differentiable methods
perform_measurement()andmodel(), which return the logarithm of the probability of the outcomes. Without this extra term the gradient used in the training is biased. This flag must be deactivated only when the measurement outcomes are generated through a differentiable reparametrization. That is, instead of extracting directly from
 it is obtained as
it is obtained as
 ,
with
,
with  being a stochastic variable extracted
from a distribution independent on
and .
being a stochastic variable extracted
from a distribution independent on
and .
- max_resources: float
Strict upper bound on the number of resources usable in an estimation, as counted by the
count_resources()method. This parameter enters in the stopping condition of the measurement loop.
- num_steps: int
Maximum number of steps in the measurement cycle of the
execute()method in theSimulationclass.
- permutation_invariant: bool = False
If the model is invariant under permutations in the unknown parameters (for all the values of the controls) this flag should be activated. Given the unknown parameters
 , the
ambiguity is lifted by fixing
, the
ambiguity is lifted by fixing
 .
.
- prec: str = 'float64'
Floating point precision of used in the simulation, can be either float32 or float64.
Achtung! The type of the probe state defined in the attribute state_specifics of the class
PhysicalModelcan be different from prec, but the precisions of theParticleFilter,PhysicalModel,SimulationParametersobjects, and of the neural network should all agree.
- resources_fraction: float = 1.0
Fraction of the estimations in a batch that must have exhausted the available resources for the measurement loop to stop and the batch of estimations to be declared complete. For example if resources_fraction=0.9 then only 90% of the estimations in the batch need to be terminated to stop the measurement loop of the
execute()method. This parameter should be used when some of the possible simulation trajectories take a large number of measurements to saturatemax_resources. Thanks to this attribute, the simulation will be stopped prematurely even if not all the estimations have terminated according to the resource availability.Achtung! The mean loss is computed also with those estimations that have been prematurely stopped.
- sim_name: str
Name of the simulation. It is the first part of the name of the files saved by the functions
train(),train_nn_graph(),train_nn_profiler(),store_input_control(), andperformance_evaluation()
- stop_gradient_input: bool = True
Stops the propagation of the gradient through the inputs of the neural network (or in general of the control strategy). This contribution to the gradient is usually redundant, and can be neglected to spare time and memory during the training. In the picture of the
SimulationParametersclass description the stopping of the gradient is represented by the dashed line going from the particle filter the input of the neural network
- stop_gradient_pf: bool = False
Stops the propagation of the gradient propagation through the Bayesian updates of the particle filter performed by the
apply_measurement()method and represented by the thick blank line in the picture in the description of theSimulationParametersclass. It can be used in conjunction withlog_lossandcumulative_lossto obtain a fully greedy optimization analogous to that of the library optbayesexpt 6.
simulation
Module containg the Simulation class.
- class Simulation(particle_filter: ParticleFilter, phys_model: PhysicalModel, control_strategy: Callable, input_size: int, input_name: List[str], simpars: SimulationParameters)
Bases:
objectThis is a blueprint class for all the Bayesian estimations.
Achtung! The user should not derive this class, but instead
StatefulSimulationorStatelessSimulation, according to the physical model of the probe.Attributes
- bs: int
Batchsize of the simulation, i.e. number of Bayesian estimations performed simultaneously. It is taken from the phys_model attribute.
- phys_model:
PhysicalModel Parameter phys_model passed to the class constructor.
- control_strategy: Callable
Parameter control_strategy passed to the class constructor.
- pf:
ParticleFilter Parameter particle_filter passed to the class constructor.
- input_size: int
Parameter input_size passed to the class constructor.
- input_name: List[str]
Parameter input_name passed to the class constructor.
- simpars:
SimulationParameters Parameter simpars passed to the class constructor.
- ns: int
Maximum number of steps of the measurement loop in the
execute()method. It is thenum_stepsattribute of simpars.
Parameters passed to the
Simulationclass constructor.Parameters
- particle_filter:
ParticleFilter Particle filter responsible for the update of the Bayesian posterior on the parameters and on the state of the probe. It contains the methods for applying the Bayes rule and computing Bayesian estimators from the posterior.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input()defined by the user. TheSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- input_size: int
Size of the last dimension of the input_strategy object passed to the callable attribute control_strategy and returned by the user-defined method
generate_input(). It is the number of scalars that the function generating the controls (a neural network typically) takes as input.- input_name: List[str]
List of names for each of the scalar inputs returned by the user-defined method
generate_input(). The length of input_name should be input_size. This list of names is used in the functionstore_input_control(), that saves a history of every input to the neural network, in order for the user to be able to interpret the actions of the optimized control strategy.- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- execute(rangen: Generator, deploy: bool = False)
Measurement loop and loss evaluation.
This method codifies the interaction between the sensor, the particle filter and the neural network. It contains the measurement loop schematically represented in the figure.
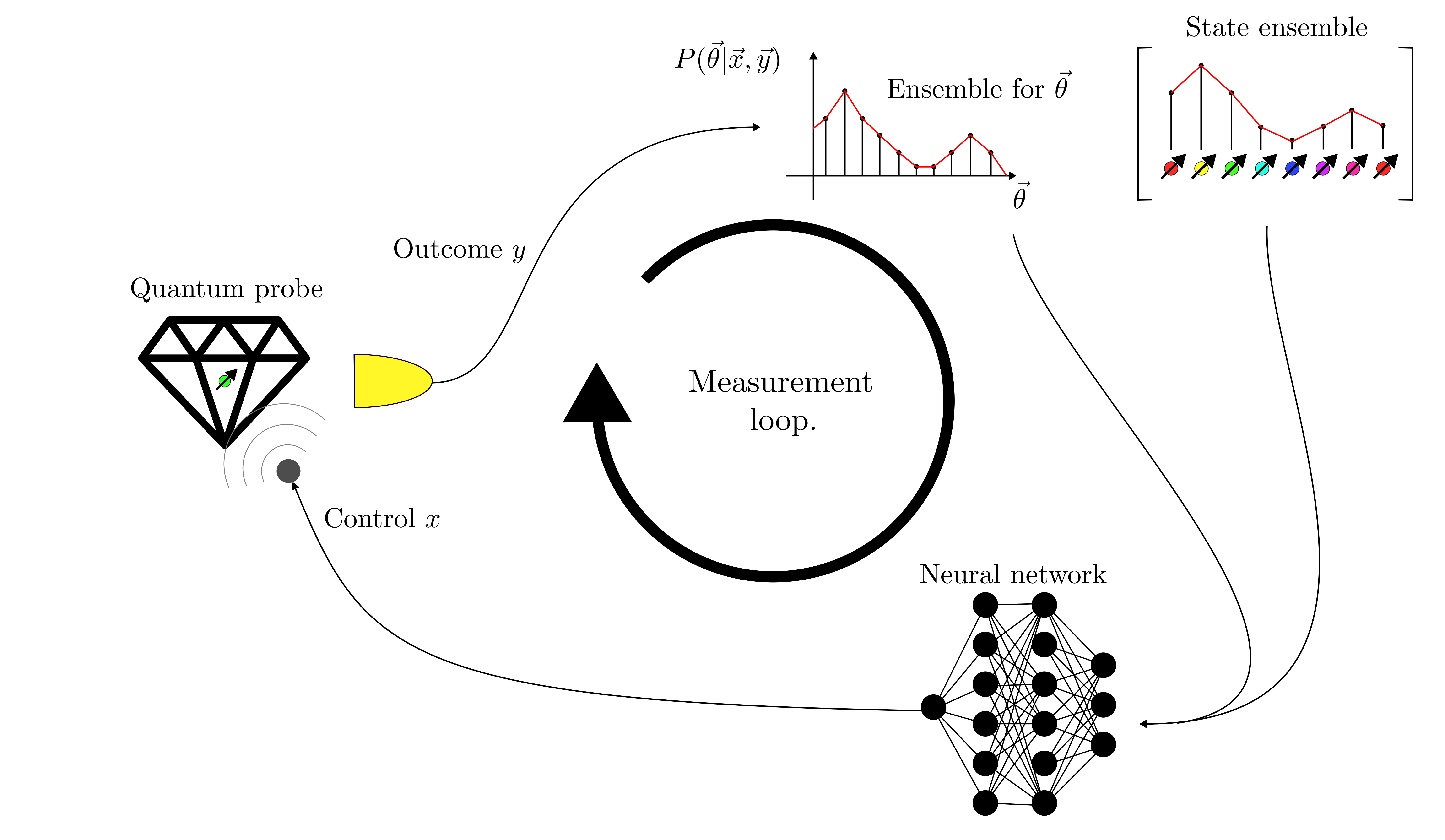
When this method is executed in the context of a GradientTape, the return value loss_diff can be differentiated with respect to the Variable objects of the control strategy for training purposes. It can also be used to evaluate the performances of a control strategy without training it. For this use, setting deploy=True is particularly useful, since it lets the method return the history of the input to the neural network, of the controls, of the consumed resources, and of the precision (the used-defined loss). This methods is used in the functions
train()andperformance_evaluation().Achtung! Ideally the user never needs to use directly this method; the functions of the
utilsmodule should suffice.The simulation of the metrological task is performed in a loop (called the measurement loop) which stops when the maximum number of iterations
num_steps(called measurement steps) is reached or when the strict upper boundmax_resourceson the amount of resources has been saturated, as computed by the methodcount_resources()Parameters
- rangen: Generator
Random number generator from the module
tensorflow.random.- deploy: bool
If this flag is True, the function doesn’t return the loss_diff parameter, but in its place the four histories history_input, history_control, history_resources, and history_precision.
Returns
- loss_diff: Tensor
Tensor of shape (,) and type prec containing the mean value of the loss on the batch of estimations performed in the measurement loop. This is the quantity to be differentiated if the
execute()method is called inside a GradientTape. This produces an unbiased estimator of the gradient of the precision for the strategy training. This version of the loss has been mixed with the log-likelihood terms for the measurement outcomes and/or the controls, according to the flags of the simpars attribute of theSimulationclass, which is an instance of theSimulationParametersclass. It is the mean loss as written in Eq.25 (or in Eq.19 if there is a baseline)Achtung! This Tensor is returned only if the deploy flag passed to
execute()is False.- loss: Tensor
Tensor of shape (,) and type prec containing the mean value of the loss on the batch of estimations without the mixing with the log-likelihood terms. It is the “pure” version of the mean loss computed from the user define method
loss_function()and takes into account the modifying flagscumulative_lossandlog_loss. This scalar is not suitable to be the differentiated loss and it is only meant to be a reference value of the true loss during the gradient descent updates that uses instead loss_diff. This return value is used in the functiontrain()that produces, along with the trained strategy, the history of the mean losses during the training. This value is returned independently on the parameter deploy.- history_input: Tensor
Tensor of shape (ns, bs, input_size) of type prec, where ns, bs, and input_size are attributes of the
Simulationclass. It contains all the objects input_strategy generated by the user-defined methodgenerate_input()and passed to the control_strategy attribute of theSimulationclass, for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources the history_input is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_controls: Tensor
Tensor of shape (ns, bs, phys_model.controls_size) of type prec, where ns, bs, and phys_model are attributes of the
Simulationclass. It contains all the controls returned by the callable attribute control_strategy of theSimulationclass, for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources history_controls is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_resources: Tensor
Tensor of shape (ns, bs, 1) of type prec, where ns, bs are attributes of the
Simulationclass. It contains the used resources accumulated during the estimation, as computed by the user-defined methodcount_resources(), for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources history_resources is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_precision: Tensor
Tensor of shape (ns, bs, 1) of type prec, where ns, bs are attributes of the
Simulationclass. It contains the loss as computed by the user-defined methodloss_function(), for a single call of theexecute()method for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources history_precision is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.
stateful_simulation
Module containing the
StatefulSimulation class.
- class StatefulSimulation(particle_filter: ParticleFilter, phys_model: PhysicalModel, control_strategy: Callable, input_size: int, input_name: List[str], simpars: SimulationParameters)
Bases:
SimulationSimulation class to be derived if the quantum probe is stateful.
If the class chosen for the model description of the probe is
StatefulPhysicalModel, thenStatefulSimulationis the class to be derived for describing the simulation.Achtung! It is technically possible to have two different instances of the
PhysicalModelclass passed to theParticleFilterand to theSimulationobjects in their respective constructors, one being stateful and the other not. For example, one might have a stateful simulation with a stateful physical model object while the physical model of the particle filter is stateless. This means that the simulation is going to take into account the evolving state of the probe in sampling the measurement outcomes but the particle filter is unable to keep track of the states ensemble of the probe. This can be done to save memory in the training at the expense of precision.Parameters passed to the
Simulationclass constructor.Parameters
- particle_filter:
ParticleFilter Particle filter responsible for the update of the Bayesian posterior on the parameters and on the state of the probe. It contains the methods for applying the Bayes rule and computing Bayesian estimators from the posterior.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input()defined by the user. TheSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- input_size: int
Size of the last dimension of the input_strategy object passed to the callable attribute control_strategy and returned by the user-defined method
generate_input(). It is the number of scalars that the function generating the controls (a neural network typically) takes as input.- input_name: List[str]
List of names for each of the scalar inputs returned by the user-defined method
generate_input(). The length of input_name should be input_size. This list of names is used in the functionstore_input_control(), that saves a history of every input to the neural network, in order for the user to be able to interpret the actions of the optimized control strategy.- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- generate_input(weights: Tensor, particles: Tensor, state_ensemble: Tensor, meas_step: Tensor, used_resources: Tensor, rangen) Tensor
Computes from the particle filter ensemble and the states ensemble the input to the control_strategy attribute of the
Simulationclass.Achtung! This method must be implemented by the user.
Parameters
- weights: Tensor
A Tensor of weights for the particles and states ensembles with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- state_ensemble: Tensor
The state of the quantum probe associated with each entry of particles. Each entry of state_ensemble is the state of the probe computed as if the particles of the ensemble were the true values of the unknown parameters. It is a Tensor of shape (bs, pf.np, pf.state_size) and type pf.state_type, where pf and bs are attributes of
Simulation.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type prec. bs is the attribute of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- input_strategy: Tensor
Tensor of shape (bs, input_size), where bs and input_size are attributes of the
Simulationclass. This is the Tensor passed as a parameter to the call of control_strategy, which is an attribute of theSimulationclass. From the elaboration of this input the function control_strategy (which is typically a wrapper for a neural network) produces the controls for the next measurement.
- loss_function(weights: Tensor, particles: Tensor, true_state: Tensor, state_ensemble: Tensor, true_values: Tensor, used_resources: Tensor, meas_step: Tensor) Tensor
Returns the loss to minimize in the training.
Achtung! This method has to be implemented by the user.
The loss should be the error of the metrological task, so that minimizing it in the training means optimizing the precision of the sensor. This function must return a loss value for each estimation in the batch. The actual quantity that is differentiated in the the gradient update depends also on the flags of the simpars attribute of
Simulation, which is an instance ofSimulationParameters. Typically the loss define by the user in this method is mixed with the log-likelihood of the of the observed outcomes in the simulation in order to obtain a bias-free estimator for the gradient from the batch.Parameters
- weights: Tensor
A Tensor of weights for the particles and states ensembles with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- true_states: Tensor
The true unobservable state of the probe in the estimation, computed from the evolution determined (among other factors) by the encoding of the parameters true_values. This is a Tensor of shape (bs, 1, pf.state_size), where bs and pf are attributes of the
Simulationclass. Its type is pf.state_type.- state_ensemble: Tensor
The state of the quantum probe associated with each entry of particles. Each entry of state_ensemble is the state of the probe computed as if the particles of the ensemble were the true values of the unknown parameters. It is a Tensor of shape (bs, pf.np, pf.state_size) and type pf.state_type, where pf and bs are attributes of
Simulation.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. The loss is in general computed by comparing a suitable estimator to these values. It is a Tensor of shape (bs, 1, pf.d) and type prec, where bs, pf, and prec are attributes of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.
Returns
- loss_values: Tensor
Tensor of shape (bs, 1) and type prec containing the metrological error defined by the used for each estimation in the batch. bs and prec are attributes of the
Simulationclass.
- particle_filter:
stateless_simulation
Module containing the
StatelessSimulation class.
- class StatelessSimulation(particle_filter: ParticleFilter, phys_model: PhysicalModel, control_strategy: Callable, input_size: int, input_name: List[str], simpars: SimulationParameters)
Bases:
SimulationSimulation class to be derived if the quantum probe is stateless.
If the class chosen for the model description of the probe is
StatelessPhysicalModel, thenStatelessSimulationis the class to be derived for describing the simulation.Parameters passed to the
Simulationclass constructor.Parameters
- particle_filter:
ParticleFilter Particle filter responsible for the update of the Bayesian posterior on the parameters and on the state of the probe. It contains the methods for applying the Bayes rule and computing Bayesian estimators from the posterior.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input()defined by the user. TheSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- input_size: int
Size of the last dimension of the input_strategy object passed to the callable attribute control_strategy and returned by the user-defined method
generate_input(). It is the number of scalars that the function generating the controls (a neural network typically) takes as input.- input_name: List[str]
List of names for each of the scalar inputs returned by the user-defined method
generate_input(). The length of input_name should be input_size. This list of names is used in the functionstore_input_control(), that saves a history of every input to the neural network, in order for the user to be able to interpret the actions of the optimized control strategy.- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- generate_input(weights: Tensor, particles: Tensor, meas_step: Tensor, used_resources: Tensor, rangen) Tensor
Computes from the particle filter ensemble the input to the control_strategy attribute of the
Simulationclass.Achtung! This method has to be implemented by the user.
Parameters
- weights: Tensor
A Tensor of weights for the particle filter ensemble with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type prec. bs is the attribute of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- input_strategy: Tensor
Tensor of shape (bs, input_size), where bs and input_size are attributes of the
Simulationclass. This is the Tensor passed as a parameter to the call of control_strategy, which is an attribute of theSimulationclass. From the elaboration of this input the function control_strategy (which is typically a wrapper for a neural network) produces the controls for the next measurement.
- loss_function(weights: Tensor, particles: Tensor, true_values: Tensor, used_resources: Tensor, meas_step: Tensor) Tensor
Returns the loss to minimize in the training.
Achtung! This method has to be implemented by the user.
The loss should be the error of the metrological task, so that minimizing it in the training means optimizing the precision of the sensor. This function must return a loss value for each estimation in the batch. The actual quantity that is differentiated in the the gradient update depends also on the flags of the simpars attribute of
Simulation, which is an instance ofSimulationParameters. Typically the loss define by the user in this method is mixed with the log-likelihood of the of the observed outcomes in the simulation in order to obtain a bias-free estimator for the gradient from the batch.Parameters
- weights: Tensor
A Tensor of weights for the particle filter ensemble with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. The loss is in general computed by comparing a suitable estimator to these values. It is a Tensor of shape (bs, 1, pf.d) and type prec, where bs, pf, and prec are attributes of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.
Returns
- loss_values: Tensor
Tensor of shape (bs, 1) and type prec containing the metrological error defined by the used for each estimation in the batches. bs and prec are attributes of the
Simulationclass.
- particle_filter:
bound_simulation
Module containing the BoundSimulation class,
for optimizing the Cramér-Rao bound for
an arbitrary estimation task.
- class BoundSimulation(phys_model: PhysicalModel, control_strategy: Callable, simpars: SimulationParameters, cov_weight_matrix: Optional[List] = None, importance_sampling: bool = False, random: bool = False)
Bases:
objectThis simulation optimizes the Cramér-Rao bound (based on the Fisher information matrix) for the local estimation of the parameters specified in the
PhysicalModelobject. This class is used for frequentist inference, instead ofSimulationwhich applies to Bayesian inference.The Cramér-Rao bound (CR bound) is a lower bound on the Mean Square Error (MSE) matrix of the frequentist estimator
at the position . In formula(26)
![\Sigma_{ij} = \mathbb{E} \left[ (\hat{\vec{\theta}}
- \vec{\theta})_i
(\hat{\vec{\theta}} - \vec{\theta})_j
\right] \ge (F^{-1})_{ij} \; ,](_images/math/e114d21eea12260b4e318e16df82d3327fc3f6a7.svg)
in other words it codifies the maximum achievable precision of an estimator around
, that
is, the ability to distinguish reliably two close
values and
 .
In the above formula we didn’t write
explicitly the dependence of the estimator
.
In the above formula we didn’t write
explicitly the dependence of the estimator
 on the
outcomes
on the
outcomes  and controls
and controls  trajectories of the experiment in order
not to make the notation too heavy.
The expectation
value is taken on many realizations
of the experiment, i.e. on the
probability distribution of the trajectories.
On the right side of Eq.26
the Fisher information matrix (FI matrix)
appears, which is defined as following
trajectories of the experiment in order
not to make the notation too heavy.
The expectation
value is taken on many realizations
of the experiment, i.e. on the
probability distribution of the trajectories.
On the right side of Eq.26
the Fisher information matrix (FI matrix)
appears, which is defined as following(27)
![F_{ij} = \mathbb{E} \left[
\frac{\partial}{\partial
\theta_i}
\log p(\vec{y}|\vec{\theta}, \vec{x}) \cdot
\frac{\partial}
{\partial \theta_j}
\log p(\vec{y}|\vec{\theta}, \vec{x}) \right] \; ,](_images/math/d0d7555c92729b92443c7f50a207731da1ed3f3d.svg)
being
 the
probability of the observed trajectory of outcomes
at the point .
Also in this case the expectation value
is taken on the experiment realizations.
A scalar value for the precision
is typically build from the matrix
the
probability of the observed trajectory of outcomes
at the point .
Also in this case the expectation value
is taken on the experiment realizations.
A scalar value for the precision
is typically build from the matrix
 by contracting it with a positive
semidefinite weight matrix
by contracting it with a positive
semidefinite weight matrix  ,
that is the attribute cov_weight_matrix_tensor
of
,
that is the attribute cov_weight_matrix_tensor
of BoundSimulation, this gives the scalar CR bound:(28)

This scalar value is the loss to be minimized in the training. Let us indicate with
the parameters
of the control strategy (the weights and biases
of a neural network), then the derivative of the
loss with respect to them can be written as(29)

The expectation value in the definition of
 is approximated in the simulation
by averaging the product of the
derivatives log-likelihoods in the batch,
i.e.
is approximated in the simulation
by averaging the product of the
derivatives log-likelihoods in the batch,
i.e.(30)

where
 is the trajectory of a particular
realization of the experiment
in the batch of simulations and
is the trajectory of a particular
realization of the experiment
in the batch of simulations and
 is the observed
Fisher information. The unbiased gradient of
the FI matrix, that takes into account
also the gradient of the probability
distribution in the expectation value,
can be computed as following
is the observed
Fisher information. The unbiased gradient of
the FI matrix, that takes into account
also the gradient of the probability
distribution in the expectation value,
can be computed as following(31)
![\frac{\partial \mathcal{L}}
{\partial \vec{\lambda}} \simeq
\frac{1}{B} \frac{\partial} {\partial \vec{\lambda}}
\text{tr} \Big \lbrace \text{sg} \left( \hat{F}^{-1}
G \hat{F}^{-1} \right) \sum_{k=1}^B \left[
f_k + \text{sg} (f_k) \log p(\vec{y},
\vec{x}|\vec{\theta}) \right] \Big \rbrace \; .](_images/math/fb65342752494f1047164fa9918a96061f910caf.svg)
The
 is the stop_gradient
operator, and the probability
is the stop_gradient
operator, and the probability  is the likelihood
of the particular trajectory, that contains
both the probability of the stochastic outcome
and the probability of the control
(in case it is stochastically generated).
is the likelihood
of the particular trajectory, that contains
both the probability of the stochastic outcome
and the probability of the control
(in case it is stochastically generated).By activating the flag
log_lossthe loss function becomes(32)

this is particularly useful to stabilize the training when the CR bounds spans multiple orders of magnitude.
For minimizing the CR bound around the point
the Parameterobjects in phys_model should be initialized with the parameter values equal to the tuple containing a single element, that is the value of the parameter at the estimation point. For example the estimation around the point can be
set with the following code
can be
set with the following codeParameter(values=(0.0, ), name='Theta')This would correspond to a delta-like prior for the parameter Theta. If a different prior
 is used, for example a uniform prior
in a range, realized through the parameter
bounds of the
is used, for example a uniform prior
in a range, realized through the parameter
bounds of the Parameterconstructor, then the FI matrix approximated by the simulation is(33)

and the minimized loss is
(34)
![\text{tr} \left[ G \cdot \bar{F}^{-1} \right] \le
\int \text{tr} \left( G
\cdot F^{-1} (\vec{\theta}) \right)
d \vec{\theta} \; ,](_images/math/184eb20e24d2462c4c049b903945b524840a03aa.svg)
which is a lower bound on the expectation value of the CR bound, because of the Jensen inequality applied to the matrix inverse. In the case of a single parameter the training maximizes the expected value of the Fisher information on the prior
 .
.With the parameter importance_sampling it is possible to use a custom distribution for extracting the trajectory. See the documentation of the class constructor for more details.
Notes
We can use this class also for the optimization of unitary quantum controls on a systems, where the only measurement is performed at the end.
Attributes
- bs: int
Batchsize of the simulation, i.e. number of Bayesian estimations performed simultaneously. It is taken from the phys_model attribute.
- phys_model:
PhysicalModel Parameter phys_model passed to the class constructor.
- control_strategy: Callable
Parameter control_strategy passed to the class constructor.
- simpars:
SimulationParameters Parameter simpars passed to the class constructor.
- ns: int
Maximum number of steps of the measurement loop in the
execute()method. It is thenum_stepsattribute of simpars.- input_size: int
Size of the last dimension of the input_strategy object passed to the callable attribute control_strategy and generated by the method
generate_input(). It is the number of scalars on which control_strategy bases the prediction for the next control. By default it is computed in the constructor of the class asinput_size = d+state_size+outcomes_size+2where d is the number of parameters to be estimated. See also the documentation of the
generate_input()method.- input_name: List[str]
List of names for each of the scalar inputs returned by the method
generate_input().The list input_name contains the following elements:
The name of the d parameters in phys_model.parameters. These are d elements.
The strings “State_#, one for each scalar component of the state of the physical model. These are state_size entries.
The strings “Outcome_#”, one for each scalar outcome. These are phys_model.outcomes_size elements.
The strings “Step” and “Res”, referring respectively to the index of the measurement and the consumed resources.
This list of names is used in the function
store_input_control(), that saves a history of every input to the neural network, in order for the user to be able to interpret the actions of the optimized control strategy. See also the documentation of thegenerate_input()method.- cov_weight_matrix_tensor: Tensor
Tensorial version of the parameter cov_weight_matrix passed to the class constructor. It is a Tensor of shape (bs, d, d) and of type prec that contains bs repetitions of cov_weight_matrix. In case no cov_weight_matrix is passed to the constructor, cov_weight_matrix_tensor contains bs copies of the d-dimensional identity matrix.
- discrete_controls: bool
This flag is True if at least one of the controls is stochastically generated in the control_strategy function.
- random: bool = False
Flag random passed to the class constructor.
- importance_sampling: bool = False
Flag importance_sampling passed to the class constructor.
Parameters passed to the
BoundSimulationclass constructor.Parameters
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input(). TheBoundSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- cov_weight_matrix: List, optional
Weight matrix for the multiparametric estimation problem. It should be a (d, d) list, with d being the number of estimation parameters. If this parameter is not passed the default value of the weight matrix is the identity.
- random: bool = False
Append a random number to the input_strategy Tensor produced by
generate_input()for each element in phys_model.controls.- importance_sampling: bool = False
It is possible to implement the method
perform_measurement()so that is extracts an outcome not from the true probability determined by the Born rule on the state of the probe, called ,
but from an arbitrary modified
distribution
,
but from an arbitrary modified
distribution
 .
As long as the probability implemented in
the method
.
As long as the probability implemented in
the method
model()is the correct one, the classBoundSimulationwill be able to perform the CR bound optimization. The trajectory of the system is sampled according to , and the FI matrix
is computed as
, and the FI matrix
is computed as(35)
![F = \mathbb{E}_{\widetilde{p}} \left[
\frac{\partial}{\partial \theta_i}
\log p(\vec{y}|\vec{\theta}, \vec{x})
\cdot
\frac{\partial}{\partial \theta_j}
\log p(\vec{y}|\vec{\theta}, \vec{x})
\frac{p(\vec{y}|\vec{\theta}, \vec{x})}
{\widetilde{p}(\vec{y}|\vec{\theta}, \vec{x})}
\right]](_images/math/082334a2876eec441b9b71fd21973fb2d168253c.svg)
which can be approximated on a batch as
(36)

with
defined in
Eq.30. Also the gradient
of is changed accordingly.Typically the distribution
is some perturbation of  , for example
it can be obtained by mixing
with a uniform distribution on the outcomes.
, for example
it can be obtained by mixing
with a uniform distribution on the outcomes.The importance sampling is useful when some trajectories have vanishingly small probability of occurring according to the model
but contribute significantly to the
Fisher information. If these trajectories
have some probability of occurring
sampling with ,
then the estimator of the FI might
be more accurate.The drawback is that the perturbed probability of the complete trajectory
 might be too different from the
real probability (because of the
accumulation of the perturbation at each step),
so that the simulation might entirely miss the
region in the space of trajectories
in which the system state moves, thus
delivering a bad estimate of the
Fisher information and a bad control strategy,
upon completion of the training.
Whether or not the importance sampling can
be beneficial to the
optimization should be checked case by case.
might be too different from the
real probability (because of the
accumulation of the perturbation at each step),
so that the simulation might entirely miss the
region in the space of trajectories
in which the system state moves, thus
delivering a bad estimate of the
Fisher information and a bad control strategy,
upon completion of the training.
Whether or not the importance sampling can
be beneficial to the
optimization should be checked case by case.
- execute(rangen: Generator, deploy: bool = False)
Measurement loop and Fisher information computation.
This method codifies the interaction between the sensor and the neural network (NN). It contains the measurement loop inside a GradientTape object used to compute the Fisher information matrix. This is done by taking the derivatives of the trajectory log-likelihood with respect to the parameters to estimate.
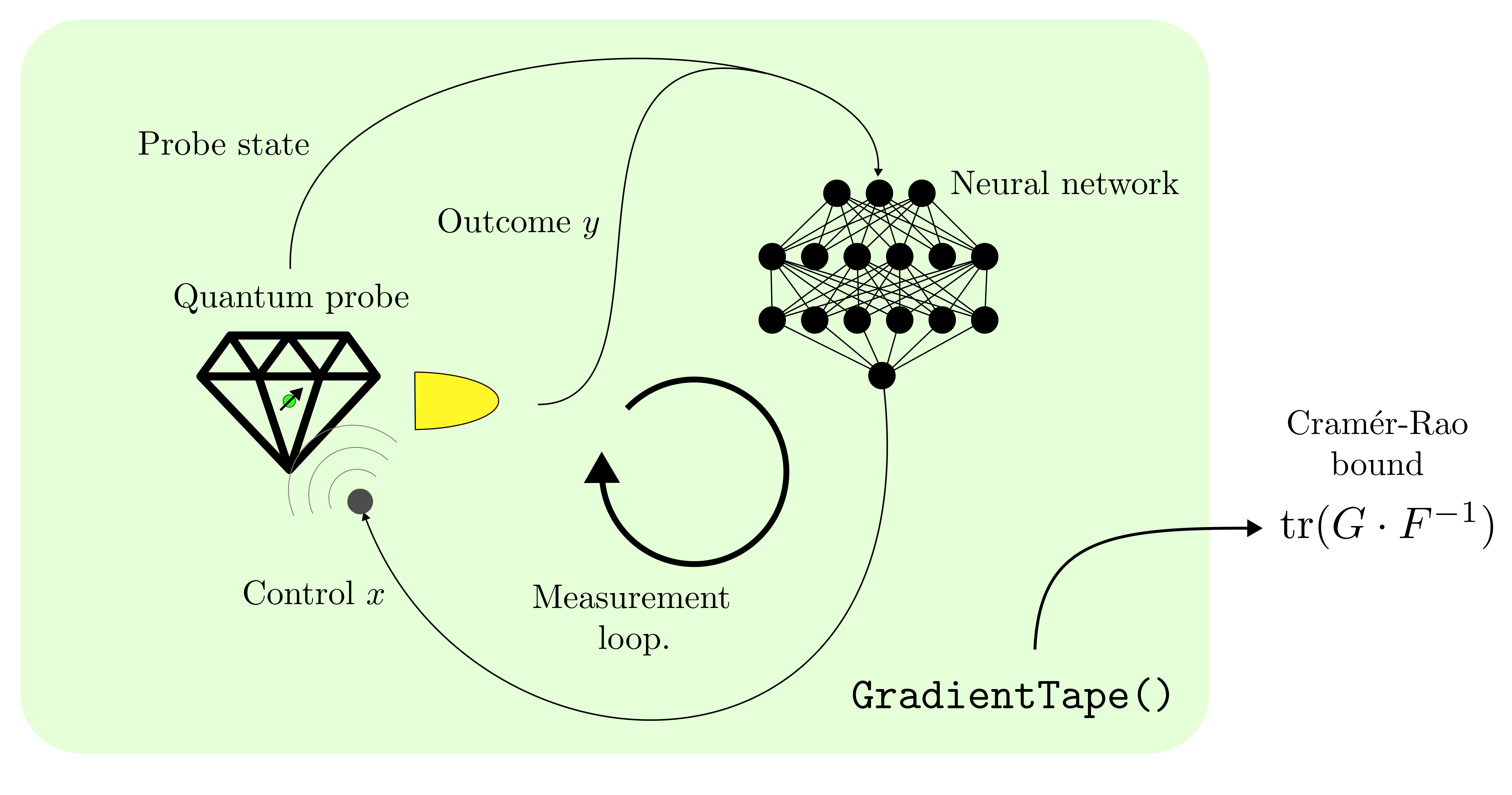
When this method is executed in the context of an external GradientTape, the return value loss_diff can be differentiated with respect to the Variable objects of the control strategy for training purposes. It can also be used to evaluate the performances of a control strategy without training it. For this use, setting deploy=True is particularly useful, since it lets the method return the history of the input to the neural network, of the controls, of the consumed resources, and of the Cramér-Rao bound for each step of the measurement loop. This methods is used in the functions
train()andperformance_evaluation().Achtung! Ideally the user never needs to use directly this method; the functions of the
utilsmodule should suffice.The simulation of the metrological task is performed in a loop (called the measurement loop) which stops when the maximum number of iterations
num_steps(called measurement steps) is reached or when the strict upper boundmax_resourceson the amount of resources has been saturated, as computed by the methodcount_resources()Parameters
- rangen: Generator
Random number generator from the module
tensorflow.random.- deploy: bool
If this flag is True, the function doesn’t return the loss_diff parameter, but in its place the four histories history_input, history_control, history_resources, and history_precision.
Returns
- loss_diff: Tensor
Tensor of shape (,) and type prec containing the differentiable loss estimated on the batch of simulations. It is the quantity to be differentiated if the
execute()method is called inside a GradientTape. This produces an unbiased estimator of the gradient of the CR bound to be used in the training. To compute loss_diff the CR bound has been mixed with the log-likelihood terms for the measurement outcomes and/or the controls, according to the flags of the simpars attribute of theBoundSimulationclass, which is an instance of theSimulationParametersclass. In formula it is the argument of the gradient in Eq.31.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is False.- loss: Tensor
Tensor of shape (,) and type prec containing the estimator of the CR computed from
 , defined in Eq.30.
If
, defined in Eq.30.
If
log_lossis true, the loss is Eq.32. This scalar is not suitable to be differentiated and it is only meant to be a reference value of the true loss during the gradient descent updates that uses instead loss_diff. This return value is used in the functiontrain()that produces, along with the trained strategy, the history of the mean losses during the training. This value is returned independently on the parameter deploy.- history_input: Tensor
Tensor of shape (ns, bs, input_size) of type prec, where ns, bs, and input_size are attributes of the
BoundSimulationclass. It contains all the objects input_strategy generated by the methodgenerate_input()and passed to the control_strategy attribute of theBoundSimulationclass, for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources the history_input is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_controls: Tensor
Tensor of shape (ns, bs, phys_model.controls_size) of type prec, where ns, bs, and phys_model are attributes of the
BoundSimulationclass. It contains all the controls returned by the callable attribute control_strategy of theBoundSimulationclass, for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources history_controls is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_resources: Tensor
Tensor of shape (ns, bs, 1) of type prec, where ns, bs are attributes of the
BoundSimulationclass. It contains the used resources accumulated during the estimation, as computed by the user-defined methodcount_resources(), for a single call of theexecute()method, for all the estimations in the batch separately and all the steps of the measurement loop. For the measurement steps that are not performed because the estimation has already run out of resources history_resources is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.- history_precision: Tensor
Tensor of shape (ns, bs, 1) of type prec, where ns, bs are attributes of the
BoundSimulationclass. It contains the CR bound for a single call of theexecute()method for all the steps of the measurement loop. In the second dimension the values of this object are repeated. For the measurement steps that are not performed because the estimation has already run out of resources history_precision is filled with zeros.Achtung! This Tensor is returned only if the deploy flag passed to
execute()is True.
- generate_input(true_values: Tensor, true_state: Tensor, meas_step: Tensor, used_resources: Tensor, outcomes: Tensor, rangen: Generator)
Constructs the input of control_strategy on the basis of which the next controls are predicted (possibly adaptively).
Achtung! If the user desires a different input_strategy Tensor he can redefine this method in a child class of
BoundSimulation.Parameters
- true_values: Tensor
Contains the true values of the unknown parameters at which the Fisher information and the Cramér-Rao bound should be computed. It is a Tensor of shape (bs, 1, phys_model.d) and type prec, where bs, pf, and prec are attributes of the
BoundSimulationclass.- true_states: Tensor
Contains the state of the quantum probe at the current time for all the estimations in the batch. The stochastic evolution induced by
perform_measurement()causes the trajectories of the state of the system to diverge. This is a Tensor of shape (bs, 1, state_size), where bs and state_size are attributes of theBoundSimulationclass. Its type is state_type.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type prec. bs is the attribute of the
BoundSimulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
BoundSimulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theBoundSimulationclass.- outcomes: Tensor
Outcomes of the last measurement on the probe, generated by the method
perform_measurement(). It is a Tensor of shape (bs, 1, phys_model.outcomes_size) of type prec.- rangen: Generator
A random number generator from the module
tensorflow.random.
Return
- Tensor:
Tensor of shape (bs, input_size) and type prec, with its columns being in order
true_values normalized in [-1, +1], that is, the lowest possible value of each parameter is mapped to -1 and the greates to +1. If only a single value is admissible for the parameter, then its corresponding column contains a series of ones.
true_state, i.e. the unnormalized state of phys_model at the moment this function is called.
outcomes, the unnormalized outcomes of the last measurement.
meas_step normalized in [-1, +1]
used_resources normalized in [-1, +1]
d columns of random number uniformly extracted in [0, 1], where d is the number of parameters to estimate. This column is present only if random=True.
stateful_metrology
Module containing the StatefulMetrology
class
- class StatefulMetrology(particle_filter: ParticleFilter, phys_model: PhysicalModel, control_strategy: Callable, simpars: SimulationParameters, cov_weight_matrix: Optional[List] = None)
Bases:
StatefulSimulationSimulation class for the standard Bayesian metrological task, with a stateful probe.
This class describes a typical metrological task, where the estimator
for the unknown parameters is the mean
value of the parameters
on the Bayesian posterior distribution,
computed with the method
compute_mean(). The loss implemented inloss_function()is the mean square error (MSE) between this estimator and the true values of the unknowns used in the simulation.The input to the neural network, computed in the method
generate_input(), is a Tensor obtained by concatenating at each step the estimators for the unknown parameters, their standard deviations, their correlation matrix, the total number of consumed resources, the measurement step, and the mean of the probe state on the posterior distribution. All this variables are reparametrized/rescaled to make them fit in the [-1, 1] interval, this makes them more suitable to be the inputs of a neural network.Achtung! The type of the probe state defined in the state_specifics attribute of the
PhysicalModelclass must be real.Attributes
- bs: int
Batchsize of the simulation, i.e. number of Bayesian estimations performed simultaneously. It is taken from the phys_model attribute.
- phys_model:
PhysicalModel Parameter phys_model passed to the class constructor.
- control_strategy: Callable
Parameter control_strategy passed to the class constructor.
- pf:
ParticleFilter Parameter particle_filter passed to the class constructor.
- input_size: int
Automatically generated size of the input_strategy Tensor returned by the method
generate_input(). Given d the number of unknown parameters, the value of input_size is given by the following formula:input_size = d**2+2*d+2+state_sizewhere state_size is the number of scalars needed to represent the state of the probe.
- input_name: List[str]
List of names for each scalar entry of the input_strategy Tensor generate by
generate_input().- simpars:
SimulationParameters Parameter simpars passed to the class constructor.
- ns: int
Maximum number of steps of the measurement loop in the
execute()method. It is thenum_stepsattribute of simpars.- cov_weight_matrix_tensor: Tensor
Tensor version of the parameter cov_weight_matrix passed to the class constructor. It is Tensor of shape (bs, d, d) and of type prec that contains bs repetitions of the parameter cov_weight_matrix passed to the class constructor. In case no cov_weight_matrix is passed to the constructor this Tensor contains bs copies of the d-dimensional identity matrix.
Parameters passed to the constructor of the
StatefulMetrologyclass.Parameters
- particle_filter:
ParticleFilter Particle filter responsible for the update of the Bayesian posterior on the parameters and on the state of the probe. It contains the methods for applying the Bayes rule and computing Bayesian estimators from the posterior.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input()defined by the user. TheSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- cov_weight_matrix: List, optional
Weight matrix
appearing
in the computation of the loss performed
by the method
loss_function(). When passed, this parameter must be a List with d rows and d columns, where d is the number of parameters to estimate. It must represent a positive semidefinite matrix. This matrix controls how the errors for the multiple parameters are weighted in the scalar loss used in the weight update step. It regulates whether a parameter is of interest or is a nuisance. If this parameter is not passed then the default weight matrix is the identity, i.e. .
.
- generate_input(weights: Tensor, particles: Tensor, state_ensemble: Tensor, meas_step: Tensor, used_resources: Tensor, rangen: Generator) Tensor
Returns the input tensor for control_strategy computed by concatenating the first moments of particle filter ensemble together with the mean state of the probe according to the Bayesian posterior, the used resources, and the measurement step.
Parameters
- weights: Tensor
A Tensor of weights for the particles and states ensembles with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- state_ensemble: Tensor
The state of the quantum probe associated with each entry of particles. Each entry of state_ensemble is the state of the probe computed as if the particles of the ensemble were the true values of the unknown parameters. It is a Tensor of shape (bs, pf.np, pf.state_size) and type pf.state_type, where pf and bs are attributes of
Simulation.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- input_strategy: Tensor
Tensor of shape (bs, input_size), where bs and input_size are attributes of the
Simulationclass. This is the Tensor passed as a parameter to the call of control_strategy, which is an attribute of theSimulationclass. From the elaboration of this input the function control_strategy (which is typically a wrapper for a neural network) produces the controls for the next measurement.input_strategy is composed on order of
Mean of unknown parameters computed on the Bayesian posterior distribution represented by the particle filter ensemble (the parameters particles and weights). It is compute calling the method
compute_mean()of the pf attribute. These mean values are normalized to lay in the interval [-1, 1]. This is possible since the extrema of the admissible values for each parameters are known and codified in eachParameterobject. In the input_name list these inputs are called “Mean_param.name”, where param is the correspondingParameterobject. These inputs are d scalars.Standard deviations around the mean for each parameter computed from the Bayesian posterior distribution. The method
compute_covariance()is used to compute the covariance matrix of the particle filter ensemble. Calling this matrix the next d inputs
for the control strategy are given by
the next d inputs
for the control strategy are given by(37)

being
 the said standard deviations.
This time, since we do not know in advance the admissible
values of the covariance matrix, we cannot cast the standard
deviation exactly in [-1, 1], but we can do it approximately
for standard deviations in the range 1~1e-5, through the above
formula. In the input_name list
these inputs are called “LogDev_param.name”, where
param is the corresponding
the said standard deviations.
This time, since we do not know in advance the admissible
values of the covariance matrix, we cannot cast the standard
deviation exactly in [-1, 1], but we can do it approximately
for standard deviations in the range 1~1e-5, through the above
formula. In the input_name list
these inputs are called “LogDev_param.name”, where
param is the corresponding Parameterobject. These inputs are d scalars.Correlation matrix between the parameters, computed as
(38)

This matrix doesn’t need normalization, since its entries are already in the interval [-1, 1]. The matrix
 is flattened and each entry is added to input_strategy,
and called “Corr_param1.name_param2.name”,
where param1 and param2 are
is flattened and each entry is added to input_strategy,
and called “Corr_param1.name_param2.name”,
where param1 and param2 are Parameterobjects. These inputs are d**2 scalars.The index of the measurement step meas_step for each simulation in the batch, normalized in [-1, 1]. This input is called StepOverMaxStep and is one single scalar.
The amount of consumed resources, i.e. the parameter used_resources, normalized in [-1, 1]. This input is called resOverMaxRes and is one single scalar.
The mean state of the probe, computed from state_ensemble with weights, using the method
compute_mean_state(). These are additional pf.state_size additional scalar inputs, which are not normalized. In input_name they are called State_entry_{i}, where i the index of the state entries.
Summing the total number of scalar inputs we get the formula for the attribute input_size, i.e.
input_size = d**2+2*d+2+pf.state_size
- loss_function(weights: Tensor, particles: Tensor, true_state: Tensor, state_ensemble: Tensor, true_values: Tensor, used_resources: Tensor, meas_step: Tensor)
Returns for each estimation in the batch the mean square error contracted with the weight matrix
,
i.e. teh attribute cov_weight_matrix_tensorParameters
- weights: Tensor
A Tensor of weights for the particles and states ensembles with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- true_states: Tensor
The true unobservable state of the probe in the estimation, computed from the evolution determined (among other factors) by the encoding of the parameters true_values. This is a Tensor of shape (bs, 1, pf.state_size), where bs and pf are attributes of the
Simulationclass. Its type is pf.state_type.- state_ensemble: Tensor
The state of the quantum probe associated with each entry of particles. Each entry of state_ensemble is the state of the probe computed as if the particles of the ensemble were the true values of the unknown parameters. It is a Tensor of shape (bs, pf.np, pf.state_size) and type pf.state_type, where pf and bs are attributes of
Simulation.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. The loss is in general computed by comparing a suitable estimator to these values. It is a Tensor of shape (bs, 1, pf.d) and type prec, where bs, pf, and prec are attributes of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.
Returns
- loss_values: Tensor
Tensor of shape (bs, 1) and type prec containing the mean square error of the mean of the posterior estimator. bs and prec are attributes of the
Simulationclass.
The error on the metrological estimation task is:
(39)
![\mathcal{L} (\vec{\lambda}) = \text{tr}
[ G \cdot \Sigma (\vec{\lambda})] \; ,](_images/math/8ee5612357696d54b92b2280756b6a0bddb1babc.svg)
where
are the trainable
variables of the control
strategy (the weights and biases of the neural
network), is the mean error matrix
of the estimator on the
batch, i.e.(40)

while
is a semi-positive matrix
of shape (d, d) called
the weight matrix
that is used to obtain a scalar error in
a multiparameter metrological problem.
The integer d is the dimension
of .
This matrix controls which errors contribute
to the final loss and how much. It discriminates
also
between parameters of interest and nuisances,
which do not contribute to the scalar loss
 , because their
corresponding entries in the matrix
are null.
, because their
corresponding entries in the matrix
are null.The mean loss in Eq.39 can be expanded as
(41)
![\mathcal{L} (\vec{\lambda}) = \sum_{k=1}^B
\text{tr} [G \cdot (\hat{\vec{\theta}}_k
- \vec{\theta}_k)_i
(\hat{\vec{\theta}}_k - \vec{\theta}_k)_j ] \; ,](_images/math/1727839358196cd5a1830822582d749faff3bacc.svg)
from which is clear what the loss
 for each single
estimation in the batch should be:
for each single
estimation in the batch should be:(42)
![\ell (\omega_k, \vec{\lambda}) = \text{tr}
[G \cdot (\hat{\vec{\theta}}_k
- \vec{\theta}_k)_i
(\hat{\vec{\theta}}_k - \vec{\theta}_k)_j ] \; ,](_images/math/f6808fe070a067e646f9b31908109bdd8f1409cb.svg)
with
 being a tuple that contains the string of observed
measurement outcomes and the true values
being a tuple that contains the string of observed
measurement outcomes and the true values
 for a particular
estimation in the batch.
This is the loss implemented in this method.
for a particular
estimation in the batch.
This is the loss implemented in this method.
stateless_metrology
Module containing the StatelessMetrology
class
- class StatelessMetrology(particle_filter: ParticleFilter, phys_model: PhysicalModel, control_strategy: Callable, simpars: SimulationParameters, cov_weight_matrix: Optional[List] = None)
Bases:
StatelessSimulationSimulation class for the standard Bayesian metrological task, with a steless probe.
This class describes a typical metrological task, where the estimator
for the unknown parameters is the mean
value of the parameters
on the Bayesian posterior distribution,
computed with the method
compute_mean(). The loss implemented inloss_function()is the mean square error (MSE) between this estimator and the true values of the unknowns used in the simulation.The input to the neural network, computed in the method
generate_input(), is a Tensor obtained by concatenating at each step the estimators for the unknown parameters, their standard deviations, their correlation matrix, the total number of consumed resources, and the measurement step. All this variables are reparametrized/rescaled to make them fit in the [-1, 1] interval, this makes them more suitable to be the inputs of a neural network.Attributes
- bs: int
Batchsize of the simulation, i.e. number of Bayesian estimations performed simultaneously. It is taken from the phys_model attribute.
- phys_model:
PhysicalModel Parameter phys_model passed to the class constructor.
- control_strategy: Callable
Parameter control_strategy passed to the class constructor.
- pf:
ParticleFilter Parameter particle_filter passed to the class constructor.
- input_size: int
Automatically generated size of the input_strategy Tensor returned by the method
generate_input(). Given d the number of unknown parameters, the value of input_size is given by the following formula:input_size = d**2+2*d+2- input_name: List[str]
List of names for each scalar entry of the input_strategy Tensor generate by
generate_input().- simpars:
SimulationParameters Parameter simpars passed to the class constructor.
- ns: int
Maximum number of steps of the measurement loop in the
execute()method. It is thenum_stepsattribute of simpars.- cov_weight_matrix_tensor: Tensor
Tensor version of the parameter cov_weight_matrix passed to the class constructor. It is Tensor of shape (bs, d, d) and of type prec that contains bs repetitions of the parameter cov_weight_matrix passed to the class constructor. In case no cov_weight_matrix is passed to the constructor this Tensor contains bs copies of the d-dimensional identity matrix.
Parameters passed to the constructor of the
StatelessMetrologyclass.Parameters
- particle_filter:
ParticleFilter Particle filter responsible for the update of the Bayesian posterior on the parameters and on the state of the probe. It contains the methods for applying the Bayes rule and computing Bayesian estimators from the posterior.
- phys_model:
PhysicalModel Abstract description of the physical model of the quantum probe. It contains the method
perform_measurement()that simulates the measurement on the probe.- control_strategy: Callable
Callable object (normally a function or a lambda function) that computes the values of the controls for the next measurement from the Tensor input_strategy, which is produced by the method
generate_input()defined by the user. TheSimulationclass expects a callable with the following headercontrols = control_strategy(input_strategy)However, if at least one of the controls is discrete, then the expected header for control_strategy is
controls, log_prob_control = control_strategy(input_strategy, rangen)That means that some stochastic operations can be performed inside the function, like the extraction of the discrete controls from a probability distribution. The parameter rangen is the random number generator while log_prob_control is the log-likelihood of sampling the selected discrete controls.
- simpars:
SimulationParameters Contains the flags and parameters that regulate the stopping condition of the measurement loop and modify the loss function used in the training.
- cov_weight_matrix: List, optional
Weight matrix
appearing
in the computation of the loss performed
by the method
loss_function(). When passed, this parameter must be a List with d rows and d columns, where d is the number of parameters to estimate. It must represent a positive semidefinite matrix. This matrix controls how the errors for the multiple parameters are weighted in the scalar loss used in the weight update step. It regulates whether a parameter is of interest or is a nuisance. If this parameter is not passed then the default weight matrix is the identity, i.e..
- generate_input(weights: Tensor, particles: Tensor, meas_step: Tensor, used_resources: Tensor, rangen: Generator) Tensor
Returns the input tensor for control_strategy computed by concatenating the first moments of particle filter ensemble together with the used resources, and the measurement step.
Parameters
- weights: Tensor
A Tensor of weights for the particle filter ensemble with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- rangen: Generator
A random number generator from the module
tensorflow.random.
Returns
- input_strategy: Tensor
Tensor of shape (bs, input_size), where bs and input_size are attributes of the
Simulationclass. This is the Tensor passed as a parameter to the call of control_strategy, which is an attribute of theSimulationclass. From the elaboration of this input the function control_strategy (which is typically a wrapper for a neural network) produces the controls for the next measurement.input_strategy is composed on order of
Mean of unknown parameters computed on the Bayesian posterior distribution represented by the particle filter ensemble (the parameters particles and weights). It is compute calling the method
compute_mean()of the pf attribute. These mean values are normalized to lay in the interval [-1, 1]. This is possible since the extrema of the admissible values for each parameters are known and codified in eachParameterobject. In the input_name list these inputs are called “Mean_param.name”, where param is the correspondingParameterobject. These inputs are d scalars.Standard deviations around the mean for each parameter computed from the Bayesian posterior distribution. The method
compute_covariance()is used to compute the covariance matrix of the particle filter ensemble. Calling this matrix the next d inputs
for the control strategy are given by(43)

being
the said standard deviations.
This time, since we do not know in advance the admissible
values of the covariance matrix, we cannot cast the standard
deviation exactly in [-1, 1], but we can do it approximately
for standard deviations in the range 1~1e-5, through the above
formula. In the input_name list
these inputs are called “LogDev_param.name”, where
param is the corresponding Parameterobject. These inputs are d scalars.Correlation matrix between the parameters, computed as
(44)
This matrix doesn’t need normalization, since its entries are already in the interval [-1, 1]. The matrix
is flattened and each entry is added to input_strategy,
and called “Corr_param1.name_param2.name”,
where param1 and param2 are Parameterobjects. These inputs are d**2 scalars.The index of the measurement step meas_step for each simulation in the batch, normalized in [-1, 1]. This input is called StepOverMaxStep and is one single scalar.
The amount of consumed resources, i.e. the parameter used_resources, normalized in [-1, 1]. This input is called resOverMaxRes and is one single scalar.
Summing the total number of scalar inputs we get the formula for the attribute input_size, i.e.
input_size = d**2+2*d+2
- loss_function(weights: Tensor, particles: Tensor, true_values: Tensor, used_resources: Tensor, meas_step: Tensor)
Parameters
- weights: Tensor
A Tensor of weights for the particle filter ensemble with shape (bs, pf.np) and type prec. Here, pf, bs, and prec are attributes of
Simulation.- particles: Tensor
A Tensor with shape (bs, pf.np, pf.d) and type prec containing the particles of the ensemble. Here, pf, bs, and prec are attributes of
Simulation.- true_values: Tensor
Contains the true values of the unknown parameters in the simulations. The loss is in general computed by comparing a suitable estimator to these values. It is a Tensor of shape (bs, 1, pf.d) and type prec, where bs, pf, and prec are attributes of the
Simulationclass.- used_resources: Tensor
A Tensor of shape (bs, 1) containing the total amount of consumed resources for each estimation in the batch up to the point this method is called. bs is the attribute of the
Simulationclass. The resources are counted according to the user defined methodcount_resources()from the attribute phys_model of theSimulationclass.- meas_step: Tensor
The index of the current measurement on the probe system. The counting starts from zero. It is a Tensor of shape (bs, 1) and of type int32. bs is the attribute of the
Simulationclass.
Returns
- loss_values: Tensor
Tensor of shape (bs, 1) and type prec containing the mean square error of the mean of the posterior estimator. bs and prec are attributes of the
Simulationclass.
Returns for each estimation in the batch the mean square error contracted with the weight matrix
,
i.e. the attribute cov_weight_matrix_tensorThe error on the metrological estimation task is:
(45)
where
are the trainable
variables of the control
strategy (the weights and biases of the neural
network), is the mean error matrix
of the estimator on the
batch, i.e.(46)
while
is a semi-positive matrix
of shape (d, d) called
the weight matrix
that is used to obtain a scalar error in
a multiparameter metrological problem.
The integer d is the dimension
of .
This matrix controls which errors contribute
to the final loss and how much. It discriminates
also
between parameters of interest and nuisances,
which do not contribute to the scalar loss
, because their
corresponding entries in the matrix
are null.The mean loss in Eq.45 can be expanded as
(47)
from which is clear what the loss
for each single
estimation in the batch should be:(48)
with
being a tuple that contains the string of observed
measurement outcomes and the true values
for a particular
estimation in the batch.
This is the loss implemented in this method.
schedulers
Module containing the InverseSqrtDecay
class.
- class InverseSqrtDecay(initial_learning_rate: float, prec: str = 'float64')
Bases:
LearningRateScheduleInverse square root decay of the learning rate.
This class implements a learning rate schedule that allows the learning rate used in the training to be a function of the iteration number, that is the number of gradient descent updates of the training variables already performed. In particular, this class realize the following schedule for the learning rate
 as function of the
iteration number (starting from zero):
as function of the
iteration number (starting from zero):(49)

being
 the initial learning rate.
The reason for wanting a decay of the
learning rate is to let the neural network
learn finer and finer details of
the optimal control strategy as the training
goes on, for which smaller and smaller
updated steps are needed.
the initial learning rate.
The reason for wanting a decay of the
learning rate is to let the neural network
learn finer and finer details of
the optimal control strategy as the training
goes on, for which smaller and smaller
updated steps are needed.Constructor of the
InverseSqrtTimeDecayclass.Parameters
- initial_learning_rate: float
Learning rate use in the first iteration of the training cycle (the number zero iteration).
- prec: str
Floating point precision of the variable to be trained. Can be either float32 or float64.
- get_config()
utils
Module containing some utility functions for training the control strategy and visualizing the results.
- class FitSpecifics
Bases:
TypedDictThis dictionary specifies the hyperparameters of the precision fit operated by the function
performance_evaluation().- batchsize: int
Batchsize of the training of the neural network to fit the Precision/Resources relation. The data cloud is divided in minibatches and each of them is used for a sigle iteration of the training loop.
- direct_func: Callable
Callable object that takes in input the precision and the consumed resources and outputs a values
that is of order one. In symbols(50)

This requires having some knowledge of the expected precision given the resources, which could be for example a Cramér-Rao bound on the precision.
- epochs: int
The number of trainings on the same data.
- num_points: int
After the fit the neural network representing the relation between the resources and the average precision is evaluated on num_points resources values equally spaced in the interval [0, max_resources], with max_resources being the attribute of
SimulationParameters.

- denormalize(input_tensor: Tensor, bounds: Tuple[float, float]) Tensor
Given input_tensor with values in [-1, 1] this function rescales it, so that its entries take values within the given tuple of extrema.
Parameters
- input_tensor: Tensor
Tensor having entries normalized in [-1, 1].
- bound: Tuple[float, float]
Min and max of the admissible entries of the returned Tensor.
Returns
- Tensor:
Version of input_tensor normalized in the interval delimited by the new extrema. Each entry
of input_tensor becomes(52)
![x = \frac{y (\text{bound}[1]-
\text{bound}[0])}{2}+\text{bounds}[0] \; .](_images/math/14a543369b68a43c3552eff038dbfeb982600ee3.svg)
It is a Tensor with the same type and shape of input_tensor.
- get_seed(random_generator: Generator) Tensor
Generate a random seed from random_generator.
Extracts uniformly a couple of integers from random_generator to be used as seed in the stateless functions of the
tensorflow.randommodule.Parameters
- random_generator: Generator
Random number generator from the module
tensorflow.random.
Returns
- seed: Tensor
Tensor of shape (2, ) and of type int32 containing two random seeds.
- loggauss(x, mean, dev)
Logarithm of a batch of 1D-Gaussian probability densities.
Parameters
- x: Tensor
Values extracted from the Gaussian distributions. Must have the same type and size of mean and dev.
- mean: Tensor
Means of the Gaussian distributions. Must have the same type and size of x and dev.
- dev:
Standard deviation of the Gaussian distributions. Must have the same type and size of mean and x.
Returns
- Tensor:
Logarithm of the probability densities for extracting the entries of x from the Gaussian distributions defined by mean and dev. It has the same shape and type of x, mean, and dev.
Calling
,  , and
, and  respectively an entry of the tensor x, mean, and dev,
the corresponding entry of the returned tensor is
respectively an entry of the tensor x, mean, and dev,
the corresponding entry of the returned tensor is(53)

- logpoisson(mean, k)
Logarithm of the probability densities of a batch of Poissonian distributions.
Parameters
- mean: Tensor
Mean values defining the Poissonian distributions. Must have the same type and shape of k.
- k: Tensor
Observed outcomes of the sampling from the Poissonian distributions. Must have the same type and shape of k.
Returns
- Tensor:
Tensor having the same type and shape of mean and k, whose entries are defined by
(54)

where
 and are respectively
the entries of k and mean.
and are respectively
the entries of k and mean.
- normalize(input_tensor: Tensor, bounds: Tuple[float, float]) Tensor
Normalizes the entries of input_tensor in the interval [-1, 1]. The input_tensor entries must lay within the given tuple of upper and lower bounds.
Parameters
- input_tensor: Tensor
Tensor of unnormalized values.
- bound: List[float, float]
Min and max of the admissible entries of input_tensor.
Returns
- Tensor:
Version of input_tensor with entries normalized in the interval [-1, 1]. Each entry
of the input becomes(55)
![y = \frac{2(x-\text{bound}[0])}{\text{bound}[1]-
\text{bound}[0]} - 1 \;](_images/math/ca892ee2f3fff5620c1f24806503866e7da51eff.svg)
in the returned Tensor, which has the same type and shape of input_tensor.
- npgauss_pdf(x, dev)
Logarithm of a batch of 1D-Gaussian probability densities (compatible with Numpy)
- performance_evaluation(simulation, iterations: int, data_dir: str, xla_compile: bool = True, precision_fit: ~typing.Optional[~qsensoropt.utils.FitSpecifics] = None, delta_resources: ~typing.Optional[float] = None, y_label: str = 'Precision', rangen=<tensorflow.python.ops.stateful_random_ops.Generator object>)
Computes the relation Precision/Resources obtained from the averaged data of a number iterations of runs of the
execute()method. Such relation is saved on disk as as a list of points (Resources, Precision) in a csv file, whose name terminate with “_eval”.The “resources” in the estimation task are defined in the method
count_resources(). Different executions of the task can only be compared when they refer to the same amount of resources.Since the estimation is a stochastic process this routine will produce the expected precision as a function of the consumed resources.
Parameters
- simulation:
Simulation Contains the complete description of the estimation task, and how the various components of it (particle filter, probe system, and control) interact to produce the estimator and the loss.
- iterations: int
Number of update steps in the training of the strategy. It is the number of complete executions of a batch of estimation tasks.
- data_dir: str
Directory containing the csv file with the evaluated relation Precision/Resources.
- xla_compile: bool = True
Just-in-time XLA (Accelerated Linear Algebra) compilation for the simulation. It should reduce the used memory and time on a GPU.
Achtung! Not all the Tensorflow operations can be compiled with XLA.
Achtung! It might not perform well on a CPU.
- precision_fit:
FitSpecifics, optional The simulations produce a cloud of points (Resources, Precision) from which a simple relation between the expected precision and the resources must be obtained. One possibility is to fit this cloud of points with a neural network.
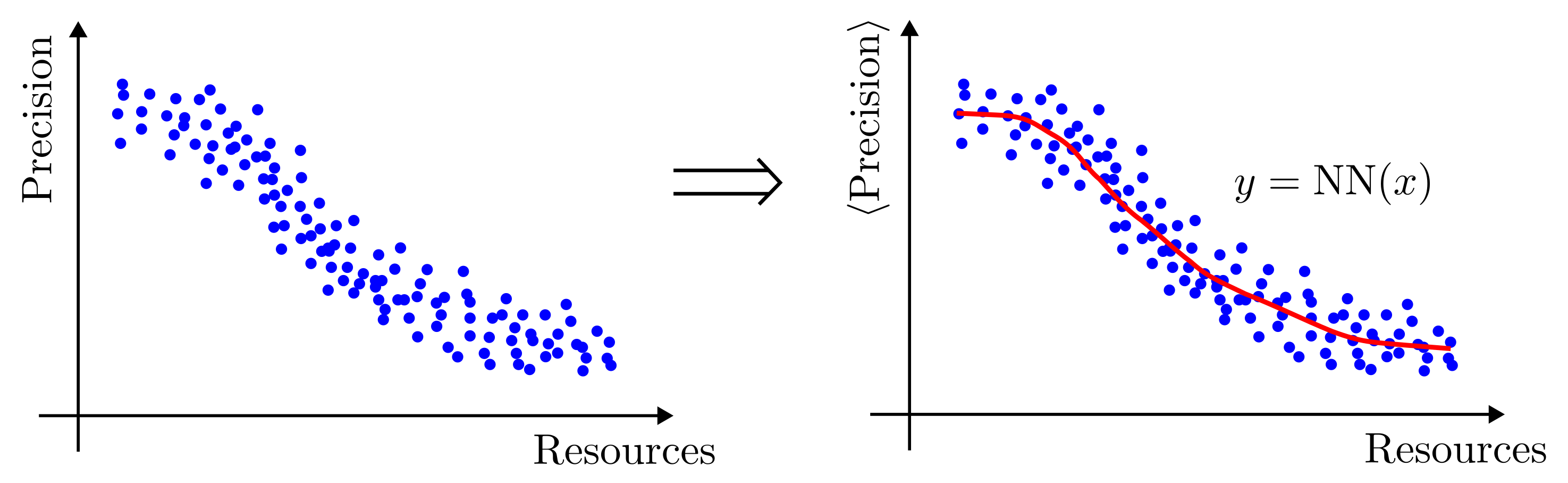
When the dictionary parameter_fit is passed to the call of this routine, then the cloud of points is fitted, and the fitted curve is saved in the csv file.
- delta_resources: float, optional
The simulations produce a cloud of points (Resources, Precision), and all the points inside a window of resources of size delta_resources are averaged in order to produce a single point containing the expected precision, which is practically the barycenter of the said window.
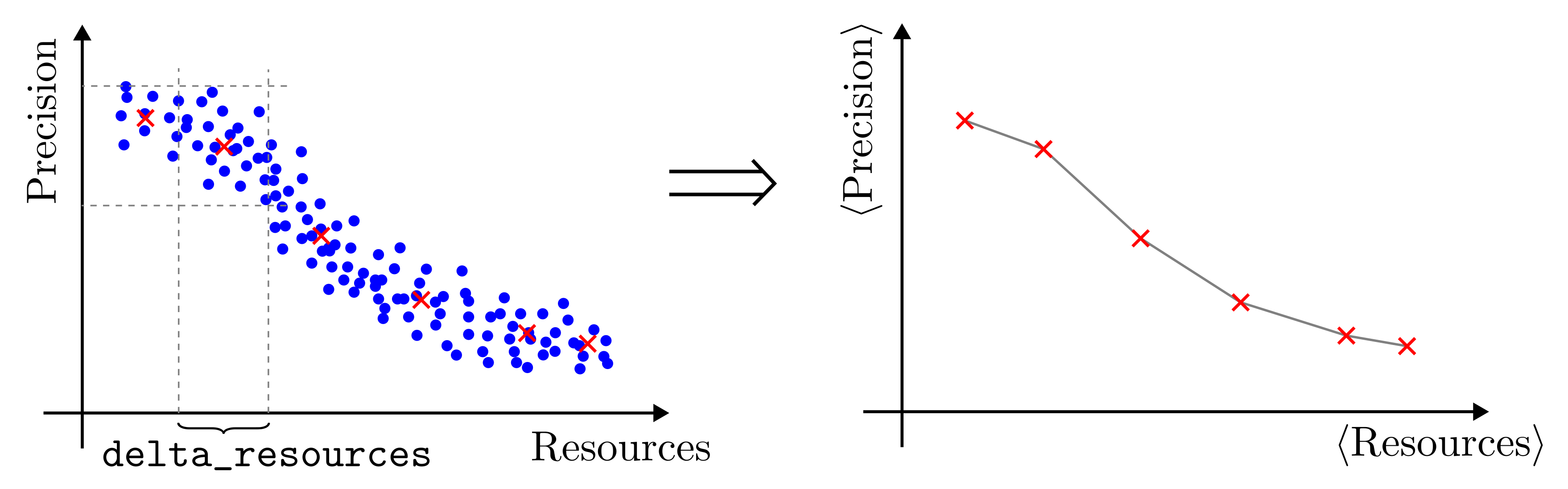
The barycenters of all the consecutive windows are saved in the csv file produced by this routine.
- y_label: str = ‘Precision’
Label of the y-component of the data saved in the csv file. This column represent the precision of the estimation and more specifically it could be the the mean square error, the error probability, etc.
- rangen: Generator = Generator.from_seed(0xdeadd0d0)
Random number generator from the module
tensorflow.random.
Notes
The parameters precision_fit and delta_resources are not mutually exclusive. When both are passed to the call of the routine, first the cloud of (Resources, Precision) points is averaged according to the value of delta_resources and then the fewer points resulting from the averaging are fitted with a neural network.
- simulation:
- random_uniform(batchsize: int, prec: str, min_value: float, max_value: float, seed: Tensor)
Extracts batchsize random number of type prec between the min_value and the max_value from a uniform distribution.
Parameters
- batchsize: int
Number of random values to be extracted.
- prec: str
Type of the extracted numbers. It is typically float32 or float64.
- min_values: float
Lower extremum of the uniform distribution from which the values are extracted.
- max_values: float
Upper extremum of the uniform distribution from which the values are extracted.
- seed: Tensor
Seed of the random number generator used in this function. It is a Tensor of type int32 and of shape (2, ). This is the kind of seed that is accepted by the stateless random function of the module
tensorflow.random. It can be generated with the functionget_seed()from aGeneratorobject.
Returns
- Tensor:
Tensor of shape (batchsize, ) and of type prec with uniformly extracted entries.
- sqrt_hmatrix(matrix: Tensor) Tensor
Square root of the absolute value of a symmetric (hermitian) matrix.
The default matrix square root algorithm implemented in Tensorflow 7 doesn’t work for matrices with very small entries, this implementation does, and must be always preferred.
Parameters
- matrix: Tensor
Batch of symmetric (hermitian) square matrices.
Returns
- Tensor:
Matrix square root of matrix.
Examples
A = constant([[1e-16, 1e-15], [1e-15, 1e-16]], dtype="float64", )print(tf.sqrtm(A))Output:
[[-nan -nan], [-nan -nan]]While
print(sqrt_hmatrix(A))outputs[[1.58312395e-09, 3.15831240e-08], [3.15831240e-08, 1.58312395e-09]]- 7
N. J. Higham, “Computing real square roots of a real matrix”, Linear Algebra Appl., 1987.
- standard_model(input_size: int = 1, controls_size: int = 1, neurons_per_layer: int = 64, num_mid_layers: int = 5, prec: str = 'float64', normalize_activation: bool = True, sigma_input: float = 0.33, last_layer_activation: str = 'tanh') Model
Returns a dense neural network to fit the optimal control strategy.
Parameters
- input_size: int = 1
Number of scalars given in input to the neural network.
- controls_size: int = 1
Number of scalars outputted by the neural network. It corresponds to the number of controls in the estimation task.
- neurons_per_layer: int = 64
Number of units (neurons) in each intermediate layer of the neural network. The intermediate layers of the neural network are all identical.
- num_mid_layers: int = 5
Number of layers between the input and the output of the neural network. Should be greater then one.
- prec: str = “float64”
Type of the weights and biases of the neural network.
- normalize_activation: bool = True
If this flag is active the activation function (tanh) is normalized to preserve the variance of the input after each layer of neurons. This should speed up the convergence.
- sigma_input: float = 0.33
Approximate variance of the input of the neural network. The default value is the variance of a uniform distribution in [-1, +1].
- last_layer_activation: str = “tanh”
Activation function of the last neural network layer.
Returns
- Model:
Sequential model made up of num_mid_layers intermediate layers, each with neurons_per_layer units. The initialization of the weight and biases is done with glorot uniform and the activation function is tanh, possibly normalized to reduce the saturation.
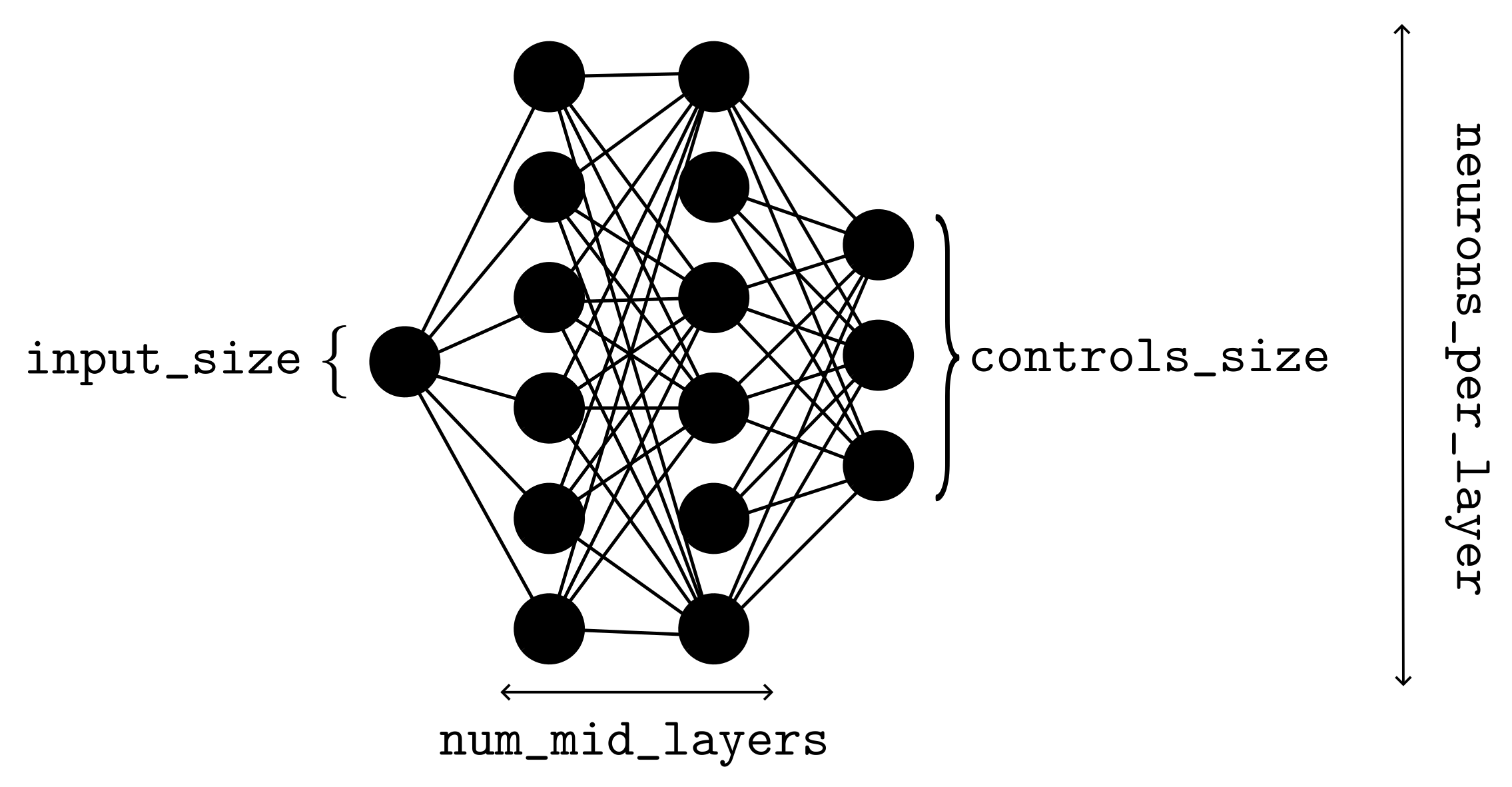
- store_input_control(simulation, data_dir: str, iterations: int, xla_compile: bool = True, rangen=<tensorflow.python.ops.stateful_random_ops.Generator object>)
This routine collects data on the behavior of of the control_strategy attribute of the simulation parameter.
Stores in a csv file all the input_strategy and the controls tensors, which are respectively the input and the output of the callable attribute control_strategy of simulation, which is a
Simulationobject. The inputs are returned by thegenerate_input()method. In the produced csv file, whose name ends in “_ext.csv” the input_strategy and controls tensors for each estimation in the batch, for a number iterations of executions of theexecutemethod.The first column of the produced csv file is Estimation and it is the index of the independent estimation to which the line is referring. It is incremented both across the batchsize and the iterations, so that it goes from 0 to bs*iterations-1. The next d columns are the true values of the unknown parameters, where d is the attribute of simulation.ps, i.e. the
ParticleFilterattribute of simulation. The next simulation.input_size columns are the entries of input_strategy produced bygenerate_input(). The last simulation.phys_model.controls_size columns contains the controls produced by simulation.control_strategy. The name of the columns are taken from the name attributes of the corresponding objects and from simulations.input_name.Achtung! The lines with null consumed resources are not reported in the csv file.
Parameters
- simulation:
Simulation Contains the complete description of the estimation task, and how the various components of it (particle filter, probe system, and control) interact to produce the estimator and the loss.
- data_dir: str
Directory in which the csv file containing the
- iterations: int
Number of update steps in the training of the strategy. It is the number of complete executions of a batch of estimation tasks for training the controls.
- xla_compile: bool = True
Just-in-time XLA (Accelerated Linear Algebra) compilation for the simulation. It should reduce the used memory and time on a GPU.
Achtung! Not all the Tensorflow operations can be compiled with XLA.
Achtung! It might not perform well on a CPU.
- rangen: Generator = Generator.from_seed(0xdeadd0d0)
Random number generator from the module
tensorflow.random.
- simulation:
- train(simulation, optimizer: ~keras.optimizers.optimizer.Optimizer, iterations: int, save_path: str, interval_save: int = 128, network: ~typing.Optional[~keras.engine.training.Model] = None, custom_controls: ~typing.Optional[~tensorflow.python.ops.variables.Variable] = None, load_best: bool = True, gradient_accumulation: int = 1, xla_compile: bool = True, rangen: ~tensorflow.python.ops.stateful_random_ops.Generator = <tensorflow.python.ops.stateful_random_ops.Generator object>)
Training routine for the neural network or the custom controls.
This function contains a cycle that performs a gradient descent optimization of the training variables of the control strategy.
Parameters
- simulation:
Simulation Contains the complete description of the estimation task, and how the various components of it (particle filter, probe system, and control) interact to produce the estimator and the loss.
- optimizer:
Optimizer This object applies the gradient to the trainable variables of the control strategy and realized therefore the update of the gradient descent step. The default optimizer to be chosen is Adam with the variable learning rate described in the class
InverseSqrtDecay.- iterations: int
Number of update steps in the training of the strategy. It is the number of complete executions of a batch of estimation tasks for training the controls.
- save_path: str
Path containing the intermediate trained variables, that are saved each interval_save iterations, and the history of the loss at the end of the training.
- interval_save: int = 128
Number of iterations of the training cycle between two consecutive saving of the training variables on disk.
- network:
Model, optional Neural network model used in the simulation object to parametrize the control strategy. In simulation it is wrapped inside the control_strategy attribute and there the
Simulationobject has no direct access to its trainable variables. If no neural network is used in the estimation, for example because a static strategy is being trained, this parameter can be omitted.- custom_controls:
Variable, optional It is possible to train a control strategy that goes beyond what can be done with a neural network, by writing a custom control_strategy function which is not only a wrapper for the neural network. The trainable variables of this custom strategy are contained in the object object custom_controls.
The typical application is that of a static strategy, that is a control strategy that depends only on the measurement step and not on the posterior distribution moments. This is a non-adaptive strategy, that therefore doesn’t need to be computed in real time, but can be hard coded before the beginning of the estimation. Such approach will save memory, because the Bayesian analysis can be postponed and performed on a more powerful device, and it will also be faster, because no computation is necessary between two measurements, since the approach is non-adaptive. Of course one can’t expect in general the same performances of the adaptive strategy.
- load_best: bool = True
Keeps track of the loss of the control strategy during the training and picks the best model instead of the last. To pick the best model the loss is averaged over interval_save update steps.
- gradient_accumulation: int = 1
This controls the “effective” batchsize of the training. In the training loop for each update of the variables the method
execute()runs a number gradient_accumulation of times and the gradients computed from each run are averaged before the update step is performed. In this way, given bs the true batchsize of the simulation object, the “effective” batchsize of the training is gradient_accumulation*bs, which is the number of independent simulations that contribute to a single update step of the training variables. This feature can be used to increase the batchsize, when the memory on the machine is limited, since the maximum amount of memory required by the training is determine by bs and is independent on gradient_accumulation.- xla_compile: bool = True
Just-in-time XLA (Accelerated Linear Algebra) compilation for the strategy training. It should reduce the memory and training time on a GPU.
Achtung! Not all the Tensorflow operations can be compiled with XLA.
Achtung! It might not perform well on a CPU.
- rangen: Generator = Generator.from_seed(0xdeadd0d0)
Random number generator from the module
tensorflow.random.
After the return of the
train()routine either network or the custom_controls will be trained and in save_path there will be a directory containing the partially trained variables (with name ending in “_weights”) and a csv file with the history of the loss (with name ending in “_history.csv”), averaged over a window of interval_save iterations.- simulation:
- train_nn_graph(simulation, optimizer: ~keras.optimizers.optimizer.Optimizer, data_dir: str, network, rangen=<tensorflow.python.ops.stateful_random_ops.Generator object>)
Produces a report of the tensor operations in the training that can be visualized in Tensorboard as a graph.
Achtung! This function works only for the training of a neural network.
Parameters
- simulation:
Simulation Contains the complete description of the estimation task, and how the various components of it (particle filter, probe system, and control) interact to produce the estimator and the loss.
- optimizer:
Optimizer This object applies the gradient to the trainable variables of the control strategy and realized therefore the update of the gradient descent step. The default optimizer to be chosen is Adam with the variable learning rate described in the class
InverseSqrtDecay.- data_dir: str
Directory in which the report containing the computational graph is saved.
- network:
Model, optional Neural network model used in the simulation object to parametrize the control strategy. In simulation it is wrapped inside the control_strategy attribute and there the
Simulationobject has no direct access to its trainable variables. If no neural network is used in the estimation, for example because a static strategy is being trained, this parameter can be omitted.- rangen: Generator = Generator.from_seed(0xdeadd0d0)
Random number generator from the module
tensorflow.random.
- simulation:
- train_nn_profiler(simulation, optimizer: ~keras.optimizers.optimizer.Optimizer, data_dir: str, network: ~keras.engine.training.Model, iterations: int = 10, gradient_accumulation: int = 1, xla_compile: bool = True, rangen=<tensorflow.python.ops.stateful_random_ops.Generator object>)
Saves profiling information regarding the memory and time consumption of each operation in the simulation that can be visualized on Tensorboard.
Parameters
- simulation:
Simulation Contains the complete description of the estimation task, and how the various components of it (particle filter, probe, …) interact to produce the estimator and the loss.
- optimizer:
Optimizer This object applies the gradient to the trainable variables of the control strategy and realized therefore the update of the gradient descent step. The default optimizer to be chosen is Adam with the variable learning rate described in the class
InverseSqrtDecay.- data_dir: str
Directory in which the report on the profiling data is saved.
- network:
Model, optional Neural network model used in the simulation object to parametrize the control strategy. In simulation it is wrapped inside the control_strategy attribute and there the
Simulationobject has no direct access to its trainable variables. If no neural network is used in the estimation, for example because a static strategy is being trained, this parameter can be omitted.- iterations: int = 10
Number of update steps in the training of the strategy. It is the number of complete executions of a batch of estimation tasks for training the controls.
- gradient_accumulation: int = 1
This controls the “effective” batchsize of the training. In the training loop for each update of the variables the method
execute()runs a number gradient_accumulation of times and the gradients computed from each run are averaged before the update step is performed. In this way, given bs the true batchsize of the simulation object, the “effective” batchsize of the training is gradient_accumulation*bs, which is the number of independent simulations that contribute to a single update step of the training variables. This feature can be used to increase the batchsize, when the memory on the machine is limited, since the maximum amount of memory required by the training is determine by bs and is independent on gradient_accumulation.- xla_compile: bool = True
Just-in-time XLA (Accelerated Linear Algebra) compilation for the strategy training. It should reduce the memory and training time on a GPU.
Achtung! Not all the Tensorflow operations can be compiled with XLA.
Achtung! It might not perform well on a CPU.
- rangen: Generator = Generator.from_seed(0xdeadd0d0)
Random number generator from the module
tensorflow.random.
- simulation:
plot_utils
Module containing some useful routines
for plotting the data contained in the
csv file produced by the routines of the
utils module. This module relies on
the functionalities of the Matplotlib.
- plot_2_values(df: DataFrame, x: str, y: str, figsize: Tuple[float, float] = (3.0, 2.0), dpi: float = 200.0, path: Optional[str] = None, log_scale: bool = True, log_scale_x: bool = False, vertical: bool = True)
Plots two arrays of values, in a standard 2d line plot.
Parameters
- df:
DataFrame Pandas DataFrame containing the values to plot. It must have two columns named x and y respectively. This routine will plot df[y] as a function of df[x].
- x: str
Name of the x-axis
- y: str
Name of the y-axis.
- figsize: Tuple[float, float] = (3.0, 2.0)
Width and height of the figure in inches.
- dpi: float = 200.0
Resolution of the figure in dots-per-inch.
- path: str = None
Directory in which the figure is saved. If it is not passed, the figure is not saved on disk.
- log_scale: bool = True
Logarithmic scale on the y-axis.
- log_scale_x: bool = False
Logarithmic scale on the x-axis.
- vertical: bool = True
Orientation of the label of the y-axis.
Notes
The name of the saved plot is plot_{x}_{y}.png.
- df:
- plot_3_values(df: DataFrame, x: str, y: str, color: str, figsize: Tuple[float, float] = (3.0, 2.0), dpi: float = 200.0, path: Optional[str] = None, vertical: bool = True)
Plots three arrays of values, one encoded in the color of the point in a scatter plot.
Parameters
- df:
DataFrame Pandas DataFrame containing the values to plot. It must have three columns named respectively x, y, and color. This routine will plot the tuples of points (df[x], df[y]) in a scatter plot. The color of the points is the column df[color], which must have values in [0, 1].
- x: str
Name of the x-axis
- y: str
Name of the y-axis.
- color: str
Name of the column represented as the color of points in the scatter plot.
- figsize: Tuple[float, float] = (3.0, 2.0)
Width and height of the figure in inches.
- dpi: float = 200.0
Resolution of the figure in dots-per-inch.
- path: str = None
Directory in which the figure is saved. If it is not passed, the figure is not saved on disk.
- vertical: bool = True
Orientation of the label of the y-axis.
Notes
The name of the saved plot is plot_{x}_{y}_c_{color}.png.
- df:
- plot_4_values(df: DataFrame, x: str, y: str, z: str, color: str, figsize: Tuple[float, float] = (6.0, 4.0), dpi: float = 300.0, path: Optional[str] = None)
Plot four array of values in a 3d scatter plot. One of the values is encoded in the color of the points.
Parameters
- df:
DataFrame Pandas DataFrame containing the values to plot. It must have four columns named respectively x, y, z, and color. This routine will plot the tuples of points (df[x], df[y], df[z]) in a 3d scatter plot. The color of the points is the column df[color], which must have values in [0, 1].
- x: str
Name of the x-axis
- y: str
Name of the y-axis.
- z: str
Name of the z-axis.
- color: str
Name of the column represented as the color of points in the scatter plot.
- figsize: Tuple[float, float] = (6.0, 4.0)
Width and height of the figure in inches.
- dpi: float = 300.0
Resolution of the figure in dots-per-inch.
- path: str = None
Directory in which the figure is saved. If it is not passed, the figure is not saved on disk.
Notes
The name of the saved plot is plot_{x}_{y}_{z}_c_{color}.png.
- df:
- plot_multiples(list_df: List[DataFrame], x: str, y: str, list_labels: List[str], figsize: Tuple[float, float] = (3.0, 2.0), dpi: float = 200.0, path: Optional[str] = None, log_scale: bool = True, log_scale_x: bool = False, title: str = '', legend_location: str = 'upper right', vertical: bool = True, list_line_syles: Optional[List[str]] = None, lower_bound_df: Optional[DataFrame] = None)
Plots two arrays of values for multiple datasets, for comparison purposes, in a standard line plot.
Parameters
- list_df: List[
DataFrame] List of Pandas DataFrame containing the values to plot. Each DataFrame in the list must have two columns named x and y respectively. This routine will plot df[y] as a function of df[x] for all the elements df of list_df on the same figure.
- x: str
Name of the x-axis
- y: str
Name of the y-axis.
- list_labels: List[str]
List of labels for each DataFrame in list_df. These are the names visualized in the legend.
- figsize: Tuple[float, float] = (3.0, 2.0)
Width and height of the figure in inches.
- dpi: float = 200.0
Resolution of the figure in dots-per-inch.
- path: str = None
Directory in which the figure is saved. If it is not passed, the figure is not saved on disk.
- log_scale: bool = True
Logarithmic scale on the y-axis.
- log_scale_x: bool = False
Logarithmic scale on the x-axis.
- title: str = “”
Title of the plot.
- legend_location: str = “upper right”,
Location of the legend.
- vertical: bool = True
Orientation of the label of the y-axis.
- list_line_syles: List[str] = None
List of strings specifying the style for each line.
- lower_bound_df: DataFrame = None
DataFrame containing the lower bound for the precision plot. Under this line everything must be colored in grey.
Notes
The name of the saved plot is plot_{x}_{y}.png.
- list_df: List[